Livro: Conversas Técnicas Sobre Motos
Fábio Magnani
[publicado originalmente em junho de 2016]

O que se segue é uma viagem física, química, econômica, política, proselitista, piegas, prolixa, repetitiva, repetitiva, rabugenta, simplória, socrática, terapêutica, propedêutica, patética, peripatética, nietzschiana, messiânica, motoqueirística, pessoal, banal e musical pela dinâmica das motocicletas.
Para começar, lembremos que é possível sim mentir com números verdadeiros. Coisa que pode ser exemplificada pelo comportamento de inúmeros políticos, jornalistas e empresas. No caso das duas rodas, canso de ouvir comentários dizendo que tal moto corre mais porque é mais potente, acelera mais porque tem mais torque, é amiga do meio ambiente porque emite menos poluentes, é econômica porque consome menos combustível, ou então que é mais segura porque tem freio antiblocante. Pode até ser verdade que uma certa moto seja mais potente, tenha mais torque, polua menos, consuma menos e tenha freio antiblocante. Nesse caso, então, esses fatos seriam verdadeiros. Por outro lado, não necessariamente as conclusões tiradas sobre eles seriam também verdadeiras, pois é possível mentir usando números verdadeiros. Se a moto tiver uma aerodinâmica ruim, não vai correr bastante, por mais potente que ela seja. Se for muito pesada, não irá acelerar tanto assim, por mais torque que tenha. Se ela emitir trinta e oito vezes mais gases do que o possível pela tecnologia atual, não será amiga do meio ambiente nunca, mesmo que seja menos suja que as motos da concorrência. Se consumir cinquenta vezes mais do que o necessário, não será econômica nunca, mesmo que seja um pouquinho menos beberrona que as outras porcarias que nos oferecem nas concessionárias. E se a moto sofrer uma colisão lateral, que é a causa mais comum dos acidentes, o freio modernoso não terá servido de nada, por mais que a fábrica tenha sugerido que aquela moto seria super segura. Sim, é possível mentir com números verdadeiros.
Aqui no Jornal Equilíbrio em Duas Rodas eu tenho duas grandes diversões: discutir as questões do mundo das duas rodas usando o maior número possível de pontos de vista e desnudar argumentos falaciosos que usam meias verdades para justificar mentiras inteiras. Como exemplo da primeira linha, quando falo em acidentes, sempre tento argumentar que esses devem ser tratados como problemas complexos, pois dependem do treinamento dos condutores, da tecnologia dos veículos, da capacidade cognitiva do ser humano, do projeto das vias, das relações interpessoais, e dos costumes e das regras do local. Já na questão dos números verdadeiros mal utilizados, cito como exemplo uma fábrica que lançou uma nova moto dizendo que seria 3.3% mais econômica do que a concorrência. Legal, né? Mas, quando você ia fazer as contas na ponta do lápis, chegava à conclusão que isso correspondia a uma melhoria de apenas 0.1%. Como assim, trinta vezes menos do que anunciaram? Pode isso, Arnaldo? É que, na propaganda, a fábrica comparava o rendimento da moto dela – que aproveitava só uns míseros 3.1% da energia do combustível, o resto sendo usado para coisas inúteis, como fazer vento, calor e barulho -, com a moto da concorrência, que usava outros míseros 3.0%. A jogada da propaganda, então, era dizer que a nova moto era melhor em 3.3% [=3.1/3.0]. Só que para isso comparava uma porcaria com outra porcaria, quando na verdade a melhoria tinha sido de apenas 0.1% [=(3.1-3.0)/100]. E a propaganda ainda dizia que se tratava de uma moto moderna. Como assim? Uma moto que aproveita apenas 3.1% da energia do combustível pode ser chamada de moderna? Uma moto que faz você gastar R$ 320,00 de combustível por mês ao invés de R$ 10,00 pode ser chamada de moderna? Eu chamaria de embuste, crime financeiro, crime contra o consumidor, propaganda enganosa, charlatanice, enganação, incompetência, desperdício, desgraceira, burrice, bestice e por aí vai. Tudo, menos de moderna. Principalmente porque, pior do que serem perdulárias, essas motos que as fábricas comercializam no Brasil são mortais. Pois a grande verdade é que 1 em cada 150 motos vendidas no Brasil mata o seu motoqueiro.

Essa conta da porcentagem de clientes mortos é bem difícil de fazer de forma precisa, pois tanto o número de motos vendidas quanto a frota mudam a cada ano. Mas, fazendo uma conta de padaria, considerando que morrem 10.000 motoqueiros por ano (mortes/ano) e que são compradas 1.5 milhão de motos a cada ano (motos/ano), chegamos a esse número de 1 motoqueiro morto a cada 150 motos compradas (mortes/moto). Claro que não são as motos vendidas naquele ano que matarão todos os motoqueiros, mas por outro lado uma moto tem muitos anos de atividades criminosas para matar seu cliente. Pensemos de outra forma. O mesmo resultado é alcançado quando vemos que a frota de motos (cerca de 15 milhões) tem média de 10 anos (15 milhões dividido por 1.5 milhão por ano). Como em 10 anos morrem 100.000 motoqueiros , calculamos que a probabilidade de uma certa moto matar o seu hospedeiro, digo cliente, é de 1 em 150 (mortes/moto). Tudo isso sem contar que o número de acidentados graves é 9 vezes maior que o número de mortos, de onde concluímos que o risco de uma moto vendida nas concessionárias participar de um grave acidente é de 1 em 15 (acidentes graves/moto).
Isso mesmo, uma em cada quinze motos vendidas participa de um grave acidente nos seus 10 anos de operações mortais, acidente esse que pode ocasionar um tempão sem poder trabalhar para sustentar seus filhos, perda de emprego, interrupção de carreira ou estudo, sequela permanente, invalidez ou morte. Uma chacina que as propagandas felizes tentam jogar para baixo do tapete. Uma matança justificada pelo progresso, pelo crescimento econômico e pela arrecadação de impostos. Uma carnificina germinada na burrice e na podridão. Uma carnificina alimentada pela ganância e pela estupidez. E não importa que esse número seja 1 em 15, ou 1 em 15.000. A imbecilidade e o mau-caratismo são os mesmos.
Quando penso nessa questão de como as poderosas fábricas usam números verdadeiros em suas propagandas enganosas feitas para vender motos que bebem demais e que matam demais, sempre lembro de uma música dos Engenheiros do Hawaii: “Nessa terra de gigantes, que trocam vidas por diamantes, a juventude é (tratada como) uma banda numa propaganda de refrigerantes. Mega ultra hiper micro baixas calorias, kilowatts, gigabytes, traço de audiência, tração nas quatro rodas. E eu? O que faço com esses números? Eu? O que faço com esses números?”.
Terra de Gigantes – Engenheiros do Hawaii
Agora, além dessas duas diversões aqui no JEDR, que são discussões gerais baseadas nos trabalhos dos outros, também gosto de falar sobre coisas específicas que vivencio, como meus estudos livrescos, as pesquisas que desenvolvemos na universidade, e meu dia a dia no tráfego urbano. Na verdade, se alguém for ler com cuidado o JEDR, poderá até pensar que tenho três personalidades diferentes: uma que gosta de estudar tudo sobre o mundo das motos e das bicicletas, outra mais limitada que tenta contribuir um pouco que seja com aspectos da engenharia, e uma terceira personalidade que gosta mais é de rodar por aí.
Curioso que essa segunda personalidade, do engenheiro mecânico pesquisador, aparece bem pouco por aqui. Ou falo de coisas bem gerais, como minhas reflexões sobre os acidentes ou minhas metáforas musicais do tráfego urbano, ou então conto uma das minhas viagens ou um dia curioso nas ruas do Recife. Acho que essa ausência do pesquisador acontece por vários motivos. Para começar, tenho certo receio em misturar trabalho com diversão, já que, catolicamente, sempre aprendi que trabalho tem que ser obrigatoriamente chato. Depois porque nosso trabalho ainda não tem a devida qualidade acadêmica para ser publicado – terá em breve, no seu devido tempo. E também porque meu tempo para o JEDR é bastante limitado, então acabo aproveitando para escrever sobre assuntos que não cabem na caixinha departamental da engenharia mecânica.
Só que às vezes me dá uma puta vontade de escrever sobre o que estamos pesquisando ou ensinando na universidade, mesmo que seja algo bem infantil ainda. Isso porque é gostoso, e porque, por mais simples que seja, acho que pode contribuir minimamente para algumas questões importantes que circulam por aí, como essa questão de como as fábricas anunciam suas “modernidades”. Além disso, o JEDR não deixa de ser uma espécie de experiência psico-socio-político-pedagógica, onde brinco com meu papel social e onde misturo conhecimento razoável com mera opinião – tudo isso baseado tanto em teorias estudadas como em práticas vivenciadas. Se eu escrevesse essas minhas misturebas em um livro acadêmico, por exemplo, não poderia dar pitacos sociológicos e também não poderia falar de como as experiências pessoais inspiram meu trabalho.
O fato é que eu podia estar roubando peças de bicicleta em busca de adrenalina, podia estar matando, podia estar cheirando clorofórmio tomado de algum laboratório, e podia estar aproveitando a minha moto. Podia também ficar quieto e não me meter na área dos outros. Ou então podia ficar parado esperando ter conhecimento e qualidade suficientes. Mas não estou com vontade de nada disso. Hoje estou com vontade de ser técnico, e, sendo bastante técnico, uma das nossas maiores curiosidades acadêmicas é estudar como os vários fenômenos motoqueirísticos se relacionam. Também estou com vontade de ser pop e piegas, então vou continuar incluindo no meio do texto referências ao disco que ouço enquanto escrevo: Engenheiros do Hawaii Acústico. E que fique claro que eu não acho as músicas dos Engenheiros piegas, muito longe disso. Piegas e medíocre apenas e somente é a minha ousadia em colocá-las lado a lado com minhas toscas palavras.
Falando dessa nossa curiosidade técnica, por exemplo, sabemos que o movimento de uma moto depende da intenção do motoqueiro (mente), do sistema de propulsão (motor), do veículo propriamente dito (motocicleta), das ruas, do tráfego, dos costumes e das regras (mundo). Por isso, para estudar o movimento das motos é fundamental levar em conta todas essas escalas físicas e temporais, e todos esses fenômenos. Para deixar a brincadeira mais legal, esse estudo deve ser feito com olhos tanto nos problemas (e.g. acidentes, preconceito, poluição, desperdício, exploração trabalhista, e oligopólio das fábricas de veículos, dos partidos políticos e das produtoras de combustível) quanto nas oportunidades (e.g., mobilidade, inclusão social, economia local e expressão cultural).
Vamos ver como é isso. Uma moto acaba de passar correndo na avenida aqui em frente. Por que? Porque o motoqueiro quis assim, porque o motor é relativamente potente, porque a moto é minimamente eficiente, porque a rua é reta e asfaltada, porque não há tráfego, porque ele se sente admirado ao se arriscar, e porque sabe que não haverá punição por colocar a sua vida e a de outros em perigo. Sim, e o que precisaria acontecer para que a velocidade fosse mais baixa? Há várias opções, entre elas educar o motoqueiro, diminuir a potência do motor, limitar a velocidade da moto, pacificar a rua, aumentar a densidade de veículos ou contratar um fiscal.
Mais uma vez. Um carro acaba de bater em uma moto aqui na esquina. Por que? Porque o motoqueiro e o carangueiro agiram de determinada forma, porque os veículos estavam em alta velocidade, porque os condutores não respeitaram as suas vidas e a dos outros, porque não havia sinalização, porque havia a certeza da impunidade, porque a pista foi mal projetada, porque havia um bueiro aberto, e porque os veículos não se comunicaram eletronicamente. Sim, e como poderíamos ter evitado esse acidente? Educação aos condutores, pista bem construída e conservada, veículos bem projetados, cumprimento das leis e por aí vai.
Dá para perceber então que qualquer fenômeno motobicicletístico tem que ser estudado e tratado a partir de vários pontos de vista: educação, incentivos econômicos, evoluções tecnológicas, mudanças culturais etc. Agora, como somos meros engenheiros por aqui, temos sérias dificuldades em estudar a parte psicológica, fisiológica e social desses eventos. Por isso nos limitamos à parte técnica: motor, motocicleta, pista e tráfego. No nosso grupo de pesquisa, o LOST, há atualmente dois doutorandos, dois mestrandos e três concluintes de graduação trabalhando com motos e bicicletas, focados na quantificação do tempo de deslocamento, no consumo de combustível, na emissão de CO2 e nos custos. Por enquanto é só isso, mas mais para a frente esperamos contribuir também na quantificação da emissão/dispersão de poluentes e nas condições necessárias para diminuir os riscos de acidentes.
Neste contexto limitado da engenharia – onde reinam os modelos matemáticos, não as modelos de revista -, aproveitei os últimos finais de semana para organizar uns modelinhos computacionais que temos usado nas disciplinas de graduação e pós-graduação. São bem qualitativos, o que significa que só podem ser usados para discutir tendências gerais e descobrir falácias grosseiras, não para quantificar exatamente o que acontecerá quando você colocar sua moto na pista.
Sim, tudo bem, mas por que usar modelos matemáticos simples e não fazer experimentos? Ou então, por que não usar grandes pacotes computacionais baseados em modelos mais completos? Temos várias razões para isso. Modelos simples evidenciam a essência dos fenômenos estudados. Portanto, ao criarmos um modelo que seja o mais simples o possível, mas que continue representando qualitativamente a realidade, nós descobrimos o que realmente é importante. Por exemplo, poderíamos construir um modelo matemático superdetalhado para calcular a velocidade máxima de uma motocicleta. Esse modelo poderia ser alimentado por todas as características dos parafusos que prendem a carenagem, como o passo da rosca, composição da liga, módulo de elasticidade, formato da cabeça, comprimento, diâmetro, torque de aperto, tratamento superficial, frequência natural e diabo a quatro. O modelo poderia ser quantitativamente perfeito, prevendo exatamente a velocidade máxima da moto. No entanto, com um modelo tão detalhado assim, jamais descobriríamos que, de todas essas propriedades dos parafusos, tão importantes para outros fenômenos, apenas o formato da cabeça influencia na velocidade máxima da moto. Se fizéssemos um modelo mais simples, levando em conta apenas a forma externa do parafuso, poderíamos aprender, por exemplo, qual a diferença percentual entre usar uma cabeça interna, redonda ou sextavada. Curioso, então, como um modelo simples pode revelar um conhecimento impossível de ser determinado por um modelo detalhado. Interessante, pois em muitos casos o conhecimento está nas coisas mais simples, não nas mais caras.
Outra forma de ver isso é imaginar alguém dizendo que é perda de tempo talhar uma estátua específica, uma vez que um único bloco bruto contém todas as possíveis estátuas de mármore. Sabemos que isso não é verdade, pois uma estátua específica tem o material do bloco mais a criatividade do artista. Assim como um modelo simples específico tem o material da matemática mais a criatividade do cientista. Precisamos dos blocos de mármore e precisamos dos métodos detalhados da ciência, mas também precisamos dos artistas e dos cientistas que sabem extrair algo daquela infinidade de informações.
Modelos simples também são importantes no processo pedagógico, para que o estudante, ao compreender o que é essencial em um fenômeno, possa depois tomar os devidos cuidados ao fazer experimentos ou ao rodar casos nos grandes pacotes computacionais. Por exemplo, daqui a pouco vamos ver como o peso influencia o comportamento de uma moto, principalmente em acelerações e subidas, mas também ao rodar no plano com velocidade constante, por causa da resistência à rolagem do pneu. Depois de analisar isso em um modelo simples, sempre que alguém ver o resultado de consumo de uma determinada moto pensará: será que durante o ensaio os caras se preocuparam em calibrar o pneu da moto?
No nosso caso, usamos modelos simples principalmente porque não temos recursos (tempo e dinheiro e pessoal) para fazer o que gostaríamos de fazer. Eu adoraria ter um laboratório com três dinamômetros, uma frota de 100 motos para testar, um túnel de vento, pilotos de testes com os mais variados perfis, pistas com as mais diversas condições, bancadas para testes de pneu e suspensão, centenas de sistemas de telemetria para monitorar as motos no tráfego, vários clusters para simular aerodinâmica, vibração e combustão, e centenas de pesquisadores que soubessem analisar os resultados. Mas não temos esses recursos, então o negócio é irmos até onde podemos ir. As fábricas, por outro lado, têm alguns (poucos) desses equipamentos, mas não têm interesse em divulgar os resultados e, na maioria das vezes, também não têm pessoal suficiente para analisar tudo isso.
Daí vem a pergunta clássica. Por que então você não vai atrás de financiamento para montar esse super laboratório? A resposta é simples, e vem em partes. Não há grandes fontes de financiamento para estudos da motocicleta. E ainda que houvesse financiamento, eu não teria currículo suficiente para obter os recursos necessários. E ainda que tivesse um currículo excelente, eu não teria tempo e capacidade para dedicar profundamente a todos os fenômenos que ocorrem na fabricação, uso e descarte das motocicletas. E ainda que eu conseguisse todos os equipamentos para estudar todos os fenômenos, não gostaria que os compromissos firmados com os financiadores (autoridades que não gostam de ouvir que suas práticas são ineficazes ou fábricas que não querem ouvir que suas motocicletas são uma porcaria) tirassem a liberdade de expressar a minha opinião. E ainda que minha liberdade fosse garantida, eu não usaria todo o meu tempo só no laboratório, pois acredito que uma boa parte da minha participação nesse lance todo está no incentivo para uma maior integração das várias áreas do conhecimento.
Gosto de brincar que as fábricas e as autoridades perderam uma ótima oportunidade de calarem um grande crítico das motos atuais – que matam demais, bebem demais, custam demais, e estorvam demais. Para tanto, bastaria terem financiado um laboratório para me manter ocupado, concentrado apenas em aspectos técnicos e, consequentemente, quieto. Eu adoraria ficar brincando com um dinamômetro, rodando ensaios em um túnel de vento, testando as motos na pista e estudando swirls e tumbles. Só que, por mais que eu goste desses detalhes da engenharia, o fato é que os motores de combustão interna têm um rendimento tão baixo, e as motocicletas têm um projeto tão mal feito para uso urbano, que esses detalhes evolutivos estão muito muito muito aquém da revolução tecnológica que podemos ter. E claro que esse comentário de que poderiam ter me calado é só uma brincadeira. Acredito que minha contribuição não está na evolução dos motores ou da aerodinâmica das motos (tem muita gente excelente trabalhando nisso), mas sim nas discussões aqui no JEDR, nas disciplinas de graduação e pós-graduação, nos trabalhos de pesquisa que oriento e nas infinitas conversas que travo por aí. É coisa pouca, é certo, mas quem sabe no futuro um empreendedor resolva montar a sua própria fábrica de veículos seguros porque leu algo por aqui, um jornalista monte uma nova revista ou um novo canal de vídeo baseados em informações realmente interessantes aos motoqueiros, um estudante depois de formado monte um super laboratório inspirado por alguma discussão que tivemos, ou então que alguém exija uma moto melhor de certa fábrica porque sabia o que pedir. Acredito que uma grande mudança só pode ser feita com a participação de um monte de gente, com visões diferentes e jeitos diferentes de trabalhar. Tento fazer a minha parte.
Voltando aos modelinhos matemáticos, o grande problema dos modelos simples é que, embora representem bem a essência, não conseguem reproduzir os detalhes. Por exemplo, se no modelo eu não incluir como o atrito do pneu com a pista muda conforme a velocidade, o modelo não irá descrever este fenômeno. Em outras palavras, não aparecem fenômenos que não foram modelados. Por essa razão, dos dois modelos que vamos olhar já-já (motor e veículo), nem pensar em utilizar o modelo do motor para qualquer discussão quantitativa, já que não modelamos direito a combustão e a dinâmica dos gases. Já o modelo da motocicleta é bem confiável, desde que os dados sejam conhecidos.
Sim, mas digamos que tivéssemos todo o dinheiro e todo tempo e todos os recursos humanos do mundo, ainda precisaríamos de modelos matemáticos? Não bastaria apenas colocar o motor no dinamômetro (que também é um modelo) e a moto no túnel de vento (que também é um modelo) e depois testar o movimento com a moto simulando certa condição de tráfego (que também é um modelo)? Precisaríamos de modelos matemáticos nesse mundo fictício onde seríamos endinheirados? Sim, precisaríamos. Precisamos de modelos matemáticos para compreender o que está acontecendo e, dessa forma, prever o que acontecerá quando modificarmos algo. Por exemplo, digamos que uma determinada linha de motos esteja consumindo demais no tráfego urbano. Se não conhecermos a teoria, teremos que mudar tudo (relação de marchas, comando das válvulas, comprimento do escape, injeção eletrônica etc. etc.) até que o consumo diminua. Com um pouco de teoria, fica bem mais fácil descobrir qual a melhor estratégia a seguir. No final, claro que teremos que fazer experimentos para ver se tudo deu certo, mas sem a teoria não sairíamos do lugar. Se tivéssemos todo o dinheiro do mundo, e todo o tempo do mundo, e toda a falta de curiosidade do mundo, e toda a obtusidade do mundo, então não precisaríamos de modelos, pois poderíamos construir todas as infinitas motos e simplesmente rodar infinitamente com elas. Mas não temos e nunca teremos, então precisamos usar a experiência dos gigantes que vieram antes de nós, sabedoria essa condensada nas teorias, para compreender o que está errado e escolher o melhor caminho a seguir. Afinal, como teria dito Einstein, só Deus não precisa de teorias, pois ele resolve as integrais empiricamente. Claro que Deus não existe, graças a Deus, mas a frase é boa demais para ser desprezada.
Armas Químicas e Poemas – Engenheiros do Hawaii
Depois dessa confissão de nossas vulnerabilidades acadêmicas, onde abri meu coração como se fosse um motor na tentativa de entender aonde leva essa loucura e qual é a lógica do sistema, voltemos então à dinâmica das motocicletas. A brincadeira é a seguinte. Temos três modelos: motor, motocicleta e tráfego. O modelo do motor (MOD_PROP) recebe como entrada a rotação no virabrequim (que no mundo real depende da velocidade da moto e da marcha selecionada) e a posição da borboleta do acelerador (que depende do piloto), e responde com a potência desenvolvida pelo motor e com o consumo de combustível naquela condição. O modelo da motocicleta (MOD_VEIC) é alimentado com a curva de velocidade desejada (que depende da pista, do tráfego, das escolhas pessoais do motoqueiro, das regras e dos costumes) e calcula a velocidade real da moto, que quase nunca é a que desejamos, pois o motor não tem potência infinita e a motocicleta tem muitas resistências. Já o modelo do tráfego (MOD_TRAF) “lê” a pista, a posição e a velocidade dos outros veículos, e então “decide” por uma certa curva de velocidade desejada, levando em conta também a vontade do motoqueiro.
Em outras palavras, a comunicação entre os três modelos é mais ou menos a seguinte. O piloto olha para as condições de tráfego e para pista, e decide que velocidade gostaria de ter (MOD_TRAF). Avaliando a sua atual velocidade, monta uma estratégia de acionamento do acelerador ou do manete de freio (MOD_VEIC), para acelerar ou desacelerar a motocicleta. Com essa informação, o motor (MOD_PROP) responde com a potência mecânica gerada naquelas condições. Agora, se a velocidade da moto vai ser aquela desejada pelo modelo do tráfego vai depender do motor ser potente o suficiente e da moto ser eficiente o suficiente – exatamente como acontece no mundo real.
Para quem não sabe como funciona um motor de moto, recomendo o texto Motores 4 Tempos aqui do JEDR. Nenhuma maravilha, mas serve como introdução. Falando especificamente do modelo do motor, esse foi implementado em um software chamado Matlab, em um conjunto de oito versões. Cada versão acrescenta algum novo aspecto ao modelo. Isso é interessante para o estudante aprender com calma cada um dos detalhes. Na primeira versão, o modelo faz o cálculo do movimento do pistão (posição, velocidade e aceleração em função do ângulo do virabrequim). Depois seguem a evolução da combustão de um combustível genérico CxHyOz tanto para misturas pobres quanto ricas; a modelagem da compressão e da expansão da mistura ar-combustível (consideramos gás perfeito com cpo constante); proposição de uma curva de evolução da combustão; aplicação da primeira lei durante a reação; cálculo das perdas térmicas; consideração do atrito mecânico, da eficiência isoentrópica na compressão e na expansão, e do controle do avanço da centelha em função da rotação; definição da curva de eficiência volumétrica em função da rotação; e, finalmente, o cálculo da potência e do consumo em função da rotação, que são as características do motor que influenciam o comportamento da motocicleta.
Como essa versão é didática, resolvi tirar a modelagem do resfriamento da mistura de entrada por causa da evaporação do combustível e também a recirculação dos gases de escape, fenômenos que tínhamos em versões passadas. No entanto, a modelagem ainda permite testar vários combustíveis, inclusive com diferentes porcentagens de ar teórico. Isso é legal, por exemplo, para estudar a diferença entre usar álcool e gasolina na moto. Interessante que o álcool, embora tenha menos energia por quilograma, aumente a potência do motor. Um quilograma de gasolina tem 58% mais energia que um quilograma de álcool, mas, por causa da estequiometria, para a mesma quantidade de ar no cilindro, você pode queimar 68% a mais de álcool. Logo, para a mesma quantidade de ar (que depende da cilindrada do motor, rotação e eficiência volumétrica), o uso do álcool aumenta a potência teoricamente em 6% (1.68/1.58). Claro que o consumo de álcool, em litros, é maior que o consumo de gasolina, mas a potência com álcool também é maior. Interessante.
E sobre a emissão de CO2? Quando queima 1 kg de gasolina você emite 3.1 kg de CO2. Queimando 1 kg de etanol gera 1.9 kg de CO2. Então, embora você precise de mais etanol para a mesma potência (42% a mais em motores reais), a emissão usando etanol (para a mesma potência) será 13% (1 – 1.42*1.9/3.1) menor que usando só gasolina. Mas esse não é realmente o ponto. A grande vantagem de usar biomassa é que o CO2 emitido volta para a biomassa na próxima plantação, então a emissão total tende a zero a médio prazo. Isso já não é verdade para combustíveis derivados do petróleo, uma vez que o CO2 produzido na sua queima demora milhões de anos para se transformar novamente em petróleo.
Lembrando sempre que, embora o CO2 seja importante em uma escala global por causa do efeito estufa e acidificação dos oceanos, os principais poluentes com malefícios locais, produzidos na queima de combustíveis, são o CO, NOx, SOx, O3, UHC, particulados etc. – bem mais difíceis de modelar. Agora, para deixar a discussão mais apimentada, o etanol aumenta sim a potência (porque você pode colocar mais combustível para a mesma quantidade de ar) e também é mais eficiente em uma base energética (sua maior octanagem permite maior taxa de compressão, se bem que desde que você não estrague tudo fazendo um motor flex, mas isso é outra história), embora seja menos eficiente na base volumétrica (que é o mais aparente para os motoqueiros, que pagam o combustível por litro, não por energia, como seria mais honesto – afinal, nós queremos o álcool pela sua energia, não para beber). O que torna a decisão entre os dois combustível mais difícil, do ponto de vista econômico, é que nunca sabemos direito quem está defendendo o que por causa do que. Há um forte lobby do álcool e um fortíssimo lobby do petróleo, os dois lutando ferozmente por subsídios e por poder político. Outra questão é que, ao cultivar a biomassa, você deixa de plantar alimentos, o que tende a aumentar o preço. Questões complicadas, mas que poderíamos compreender se houvesse mais transparência e clareza nas escolhas governamentais.
Como o objetivo deste texto é mais a relação do motor com a motocicleta, e não somente o estudo do motor, vou passar meio rápido nessa parte. Prometo que outro dia explico isso com mais calma. Aliás, no ano passado os estudantes de Engenharia da Motocicleta fizeram, como trabalho, uma apostila bem legal sobre esse modelo do motor. Pena que neste ano não houve nenhum estudante interessado nessa disciplina, o que nos faz pensar se voltaremos a ofertá-la no ano que vem ou se continuaremos daqui em diante só na pós-graduação mesmo. De qualquer forma, o negócio agora é dar uma olhada nos principais resultados da Figura 1 (que é a saída gráfica do MOD_PROP).
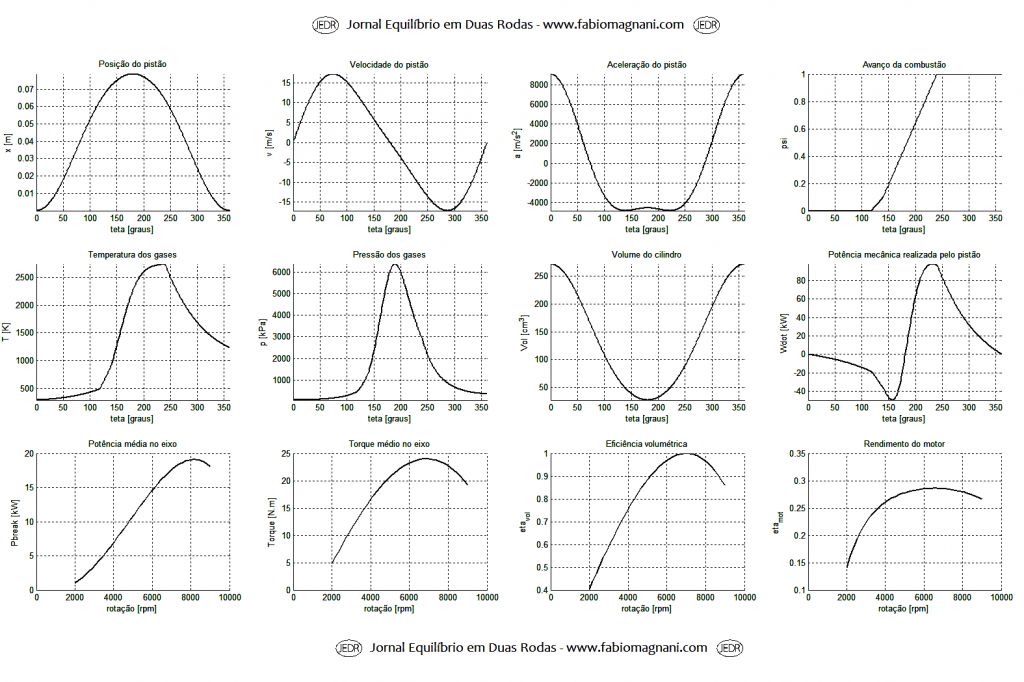
Figura 1: Comportamento do motor.
Os gráficos da Figura 1 podem ser divididos em dois grandes grupos. Nas duas primeiras linhas, o que está representado é o comportamento das variáveis dentro do motor enquanto este roda 360 graus (modelamos só a compressão e a expansão). Nesses oito gráficos mostrados, a rotação é sempre 4000 rpm. Já os quatro gráficos da última linha representam grandezas integradas em diversas rotações. Por exemplo, a integral da curva da potência instantânea do motor (Figura 1: linha 2, coluna 4), depois de descontada a potência para vencer as resistências internas do motor, resulta em um único ponto da curva de potência média (Fg1: l3-c1). Em outras palavras, as duas primeiras linhas de gráficos espelham o que acontece dentro do cilindro, enquanto a linha de baixo mostra o que acontece com o motor como um todo.
Óbvio que existe uma relação entre o que acontece dentro do motor e o seu comportamento integrado. A velocidade do pistão (Fg1: l1-c2), por exemplo, influencia na resistência dos anéis ao movimento e também no desgaste do cilindro. Na figura, dá para observar como a velocidade é nula no ponto morto inferior (0 grau), chega ao máximo em algum lugar próximo à metade do percurso, e depois é reduzida novamente para zero no ponto morto superior (180 graus). Depois disso a velocidade fica negativa, indicando que o pistão está descendo para o ponto morto inferior.
A aceleração (Fg1: l1-c3), quando multiplicada pela massa do pistão/biela, é uma das principais causadoras da vibração do motor. Então, em princípio, deveríamos trabalhar com baixas rotações e, consequentemente, baixas acelerações. A questão é que, quando queremos aumentar a potência de um motor, temos que colocar mais combustível dentro do cilindro por unidade de tempo, o que é relativamente fácil, mas também temos que colocar o ar lá dentro para queimar o combustível, e essa aspiração do ar é que é difícil.
Para aumentar a quantidade de ar há três formas: aumentar o tamanho do cilindro (o que aumenta a quantidade de ar a cada aspiração), aumentar a eficiência volumétrica (que é razão entre o volume do ar que realmente entra no motor dividido pelo volume que entraria se todo o cilindro fosse preenchido por ar na condição ambiente – mais sobre isso um pouco abaixo), ou aumentar a rotação do motor (que aumenta a vazão de ar por unidade de tempo).
Aumentar o volume do cilindro aumenta também, além da vazão de ar, o preço, o peso e o volume externo do motor. Aumentar a eficiência volumétrica é bastante interessante, mas depois de um certo ponto não há mais o que fazer. Já aumentar a rotação aumenta também a força de inércia (massa vezes aceleração) dos pistões, o que consequentemente aumenta a vibração do motor. Uma forma de reduzir esse último efeito é diminuir a massa do pistão, dividindo-o em vários pistõezinhos pequenos (motor multicilindro), com o outro efeito benéfico de se co-balancearem parcialmente. Essa é a grande razão de termos motores com vários cilindros (mais caros e complexos), já que esses têm pistões mais leves, o que permite acelerações maiores e, consequentemente, maior potência. Uma outra vantagem de vários cilindros pequenos, ao invés de poucos grandões, é a possibilidade do aumento da eficiência volumétrica e da velocidade da combustão.
Uma combustão mais rápida permite que a pressão aumente rapidamente no momento em que o pistão está na parte de cima do cilindro, aumentando a força sobre o virabrequim. O processo de combustão depende basicamente da dinâmica dos gases que compõem a carga e é de difícil modelagem. Falei um pouco sobre isso no texto Avanço da Centelha. No presente caso, o avanço da combustão (Fg1: l1-c4) foi escolhido de forma relativamente arbitrária e representa, por essa razão, a grande limitação deste modelo que, como eu já tinha dito, não pode ser usado para análises quantitativas. No entanto, modelamos algumas características interessantes, como um período de 10% da combustão com tempo constante e outro período de 90% com variação de ângulo constante. Isso é mais ou menos o que acontece na prática, já que o início da queima é realizado dentro dos vórtices, então com velocidade constante, enquanto a parte principal da mistura queima entre os vórtices, e portanto com uma velocidade que aumenta conforme a rotação do motor.
A temperatura (Fg1: l2-c1) e a pressão (Fg1: l2-c2) dentro do cilindro dependem da taxa de compressão, do combustível utilizado, da relação ar-combustível e outras variáveis. O início do aumento nessas variáveis se dá pela compressão (até 120 graus), depois aumenta acentuadamente por causa da combustão (legal seguir pela Fg1: l1:c4). Nunca nos esqueçamos que o modelo é bem simples e que, portanto, esses valores estão exagerados. Outra informação do modelo é o volume (Fg1: l2-c3) dentro do cilindro, que varia linearmente com a posição do pistão (Fg1: l1-c1). Neste caso dá para ver que o motor tem taxa de deslocamento de 250cc, com taxa de compressão de 10:1.
Uma curva interessante é da potência mecânica do pistão (Fg1: l2:c4). Na parte inicial da curva essa potência é negativa, indicando que o motor consome energia para comprimir a mistura (essa energia vem da inércia da motocicleta, do volante ou de outros pistões desenvolvendo potência). Na descida do pistão, a alta pressão, produto da compressão e da combustão, força o pistão para baixo, realizando trabalho sobre o virabrequim.
Mas a curva mais importante para entender a dinâmica da moto é a da potência em função da rotação (Fg1: l3-c1). A potência não é constante porque, com o aumento da rotação, cada vez o motor aspira mais ar por unidade de tempo, o que significa que podemos queimar mais combustível. O que explica porque a potência aumenta quando aumenta a rotação. Só que, além disso, há perdas. Para baixas rotações, a perda de calor é percentualmente mais significativa, fazendo com que uma parte maior da energia do combustível vá para o arrefecimento. Do lado da alta rotação, o problema maior é o atrito, que aumenta com a velocidade do pistão e dos eixos nos mancais.
A principal influência na potência, no entanto, é da tal eficiência volumétrica (Fg1: l3-c3). A questão aqui é que, na prática, você não consegue colocar todo o ar que gostaria dentro do motor. Imagine o cilindro como uma sala com uma parede móvel. Conforme a parede (pistão) se move, as pessoas que estão esperando no corredor de fora (duto de admissão) entram de forma ordenada. Quando a parede chega ao final do seu curso, a porta se fecha (válvula) com a sala completamente cheia. Agora imagine que a parede se move bem rápido. Há um tempo para o pessoal do corredor começar a entrar na sala. Quando a parede chega ao final, parte das pessoas ainda está no corredor. Logo, entra menos gente do que seria teoricamente possível. E por essa e outras razões a eficiência volumétrica do motor muda com a rotação.
Dá para compensar isso. Por exemplo, usando um turbocompressor, que era comum nas competições antes da segunda guerra mundial, mas que tem seus problemas, como eficiência, peso, preço e volume. Uma forma mais fácil (desde que você saiba o que está fazendo) é alterar a dinâmica dos gases, seja por alteração nos dutos (admissão e escape), ou no tempo da válvula, como eu comentei no texto Influência das Válvulas. A questão é que essas modificações não fazem milagres, pois aumentam a potência em uma rotação mas diminuem em outra. Por isso é bom tomar cuidado ao mudar o escape de uma moto, por exemplo. O barulho pode até aumentar, mas a potência pode diminuir.
O papel do acelerador de uma motocicleta é exatamente mudar a eficiência volumétrica do motor. Quando você fecha um pouco o acelerador, a borboleta fecha um pouco no duto de admissão, dificultando a passagem do ar. Dessa forma, entra menos ar no pistão e, consequentemente, diminui a eficiência volumétrica. Portanto, por um lado queremos que a eficiência volumétrica seja bastante alta com a borboleta aberta, pois queremos um motor com boa potência. Por outro lado, queremos um dispositivo que permita o controle da eficiência volumétrica, controlando assim a potência do motor.
Como a transferência de calor, o atrito e a eficiência volumétrica variam com a rotação, consequentemente varia o rendimento do motor (que é a razão entre a energia mecânica gerada pelo motor e a energia liberada na queima do combustível). No nosso exemplo (Fg1: l3-c4), o rendimento do motor varia de 15 a 28%, o que significa que, em média, esse motor consegue converter 20% da energia do combustível em potência mecânica no eixo de saída. Ruim, né? Mas é bem pior do que isso, pois a maior parte dessa energia do eixo será usada para coisas inúteis, como vencer a resistência aerodinâmica da moto, a resistência à rolagem dos pneus e para acelerar a própria moto. Lembremos que o objetivo da moto é mover o piloto, não fazer barulho, aquecer o mundo, fazer ventinho ou levar ela mesma para passear. Na verdade, o que vale mesmo para o motoqueiro é a eficiência de propulsão, que é a razão entre a energia usada para mover o piloto e a energia do combustível. Essa eficiência, nas motos atuais, fica na faixa dos 2%. Eu teria muita vergonha de comercializar uma moto tão ineficiente assim. Poderiam achar que sou burro.
As fábricas preferem dizer que seus motores têm rendimento de 20% do que publicar que suas motocicletas têm eficiência de 2%. A eficiência real (quanto da energia foi usada para algo útil: mover o motoqueiro) é muito baixa, uma vergonha da engenharia, muito embora uma vitória (?) da propaganda enganosa e dos think tanks. Para avaliar essa tal eficiência, é preciso considerar tanto o motor quanto a motocicleta como um todo, que é o objetivo desses nossos modelos. E mesmo assim isso ainda não é suficiente, pois o tráfego e as vias também influenciam como as motos são conduzidas. É necessário avaliar (1) o motor, (2) a motocicleta e (3) as condições em que a moto será usada.
Essas curvas que geramos com esse modelinho simples (potência na Fg1:l3-c1, e rendimento na Fg1:l3-c4) em geral são obtidas de outras formas. As formas mais comuns são usar um modelo matemático detalhado, uma correlação empírica ou, melhor ainda, fazendo ensaios em um dinamômetro. Mas é bom tomar certo cuidado com o uso de dinamômetros. Onde foi medida a potência? No virabrequim, eixo de saída da caixa de marchas, no eixo da roda ou no contato do pneu? Segundo, foi usado um dinamômetro de freio (e.g., mecânico, hidráulico, eletromagnético) ou inercial? Terceiro, a curva do dinamômetro envelopa a curva do motor? As condições ambientais foram corrigidas? A potência foi medida com posições parciais de abertura da borboleta? Como o consumo de combustível foi determinado? Qual é a composição do combustível? Que dados foram usados para “simular” as resistências da moto? Será que a alimentação de ar para o motor é a mesma no dinamômetro do que quando a moto está em movimento? Em outras palavras, a verdade é que, embora o dinamômetro seja um experimento físico, nem sempre o seu operador sabe o que está medindo e, mais importante ainda, nem sempre a moto está nas mesmas condições que enfrentará no mundo real. Sim, porque o dinamômetro pode até ser um experimento físico, mas mesmo assim continua sendo apenas um modelo simples do que acontece com a motocicleta nas ruas. Como também são modelos os túneis de vento, as competições e os testes controlados. Todos esses são tentativas de representar o que acontece no mundo real. Todos modelos.
Talvez você tenha notado que eu pulei um dos gráficos, o do torque (Fg1: l3-c2). Fiz isso porque essa informação é totalmente desnecessária desde que você conheça a curva de potência. Afinal, T=P/w (o torque é a potência dividida pela rotação), então, conhecendo a potência você conhece o torque. Por que então as pessoas falam tanto de torque? Dizem que “torque é para acelerar, potência é para velocidade final”. Bem, isso não está errado, mas é um raciocínio desnecessário, confuso e, muitas vezes, usado para o mal.
As três principais grandezas usadas para avaliar a dinâmica de uma motocicleta (potência, torque e força) são intercambiáveis: P=Tw=FV=TV/R (onde P:potência, T:torque, w:velocidade angular, F:força, V:velocidade linear, R:raio). Portanto, conhecendo as características da moto (diâmetro do pneu, relações de transmissão etc.), é possível calcular uma grandeza a partir da outra, e vice-versa.
Vejamos essa questão de potência e torque que tanto falam por aí. A Figura 2 mostra o comportamento de um motor (que chamaremos de motor preto nos estudos comparativos abaixo) a partir de suas curvas de potência (linha contínua) e de torque (linha pontilhada) em função da rotação. Essas grandezas, neste exemplo, são medidas no eixo de saída do motor. É muito importante dizer onde as coisas estão sendo medidas, pois no caso da potência há um decaimento entre o pistão e o eixo da roda que pode chegar a 15%, e no caso do torque as variações podem passar dos 3000%, dependendo de onde se mede.
Mas vamos começar do começo. Para começar, como eu disse aí em cima, essas curvas trazem a mesma informação, pois T = P/w (o torque pode ser obtido a partir da potência, desde que os dois sejam medidos no mesmo eixo) ou, obviamente, P=Tw (a potência pode ser obtida a partir do torque, desde que os dois sejam medidos no mesmo eixo).
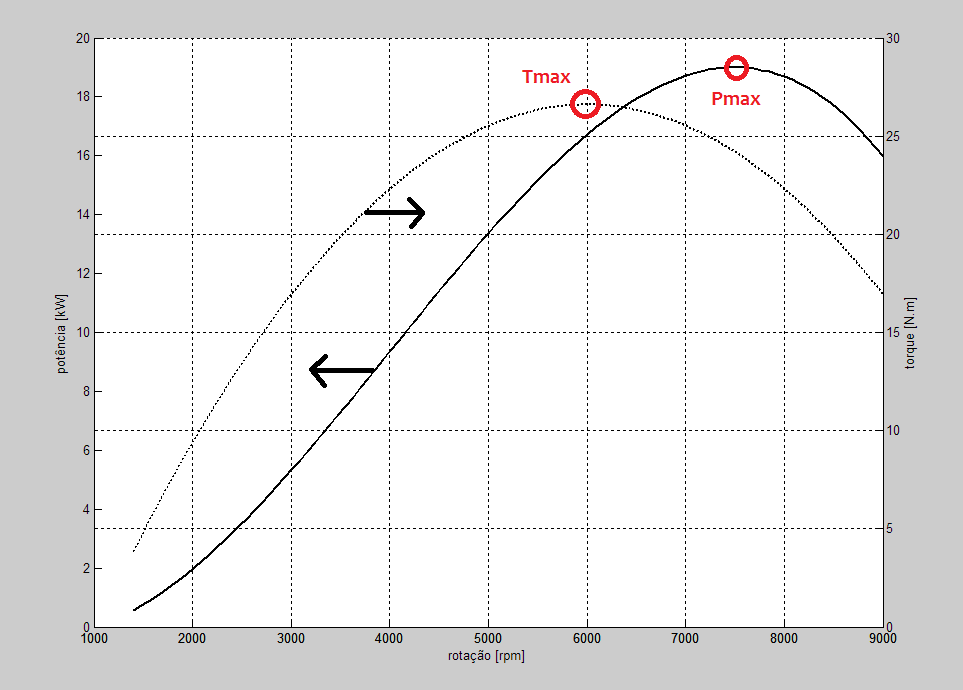
Figura 2: Motor preto – curva de potência (linha cheia) e torque (linha pontilhada).
As fábricas, no entanto, não publicam essas curvas, mas apenas dois pontos: a potência máxima (19kW @7500 rpm) e o torque máximo (26.5Nm @6000 rpm). Vou usar ‘kW’ para potência e ‘Nm’ para o torque, pois são unidades do SI, mas o mais comum aqui no Brasil é usar ‘CV’ e ‘kgf.m’. O valor em ‘CV’ sempre é maior que em ‘kW’, e talvez por isso a escolha das fábricas de assim venderem suas máquinas. Afinal, em ‘CV’ elas parecem mais potentes. Por falar nisso, as fábricas também pensam que colocar um monte de plástico em volta do tanque é outra forma de fazer a moto parecer mais potente. Mas o que importa nesta discussão é que, ao invés de fornecerem uma curva completa, as fábricas publicam só um ponto de uma curva e só um ponto de outra curva, que estão mostrados em círculos vermelhos na Figura 2.
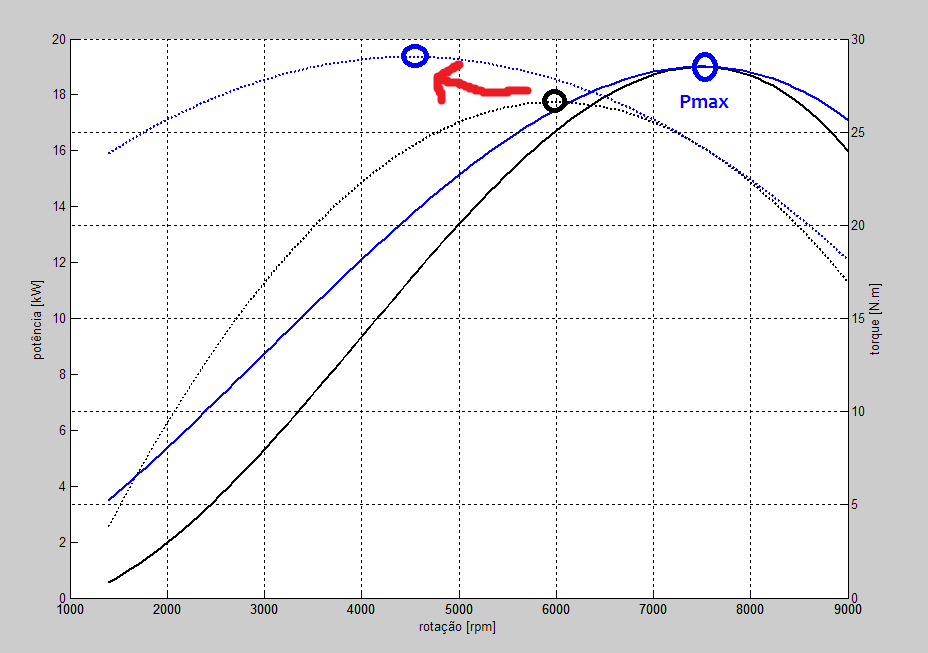
Figura 3: Motores com torques máximos diferentes, mas com a mesma potência máxima (19kW). Destaque à mudança na curva de torque. Potência representada pelas curvas cheias e torque pelas pontilhadas.
Para ver qual é a relação entre torque e potência, vamos imaginar uma moto azul na qual o motor foi modificado para aumentar o torque máximo, mas sem mexer na potência máxima, como mostrado na Figura 3. Nesse caso, as pessoas dizem que a moto azul (curva azul) tem “mais torque” do que a moto preta (curva preta). E a verdade é que o motor da moto azul permite sim maior aceleração do que o motor da moto preta (cuidado, pois se as motos forem diferentes não podemos concluir isso só olhando para as curvas dos motores, ok?). Mas, eu não tinha dito que falar em torque era completamente desnecessário? Esse daqui não é um exemplo claro de que uma moto com “mais torque” (torque máximo) acelera mais do que outra com “menos torque” (torque máximo), mesmo que as duas tenham a “mesma potência” (potência máxima)?
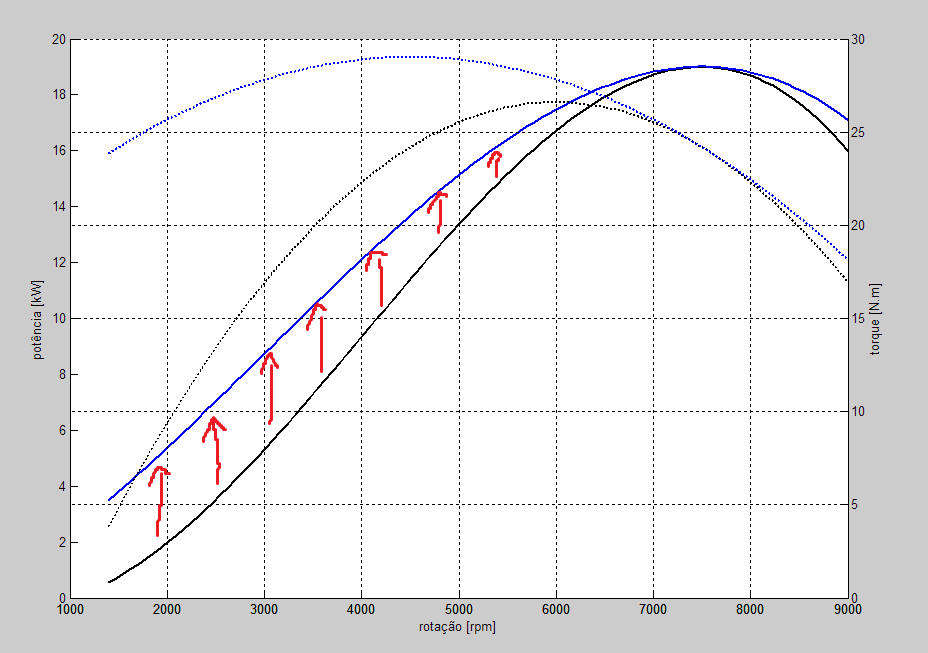
Figura 4: Motores com torques máximos diferentes, mas com a mesma potência máxima. Destaque à mudança na curva de potência. Potência representada pelas curvas cheias e torque pelas pontilhadas.
A questão aqui é que, como mostrado na Figura 4, que tem exatamente as mesmas curvas da Figura 3, ao alterar a curva de torque, a curva de potência também é modificada. O que é obrigatório, já que P=Tw. É simplesmente impossível mudar a curva de torque sem mudar a curva de potência, e vice-versa. A moto azul acelera mais não porque tem “mais torque” (torque máximo), mas sim porque sua curva de potência é mais alta em uma grande faixa de rotação. A moto azul acelera mais porque tem curva de potência mais alta!
Tudo bem, eu até concordo que dizer que a moto azul tem “mais torque” é, neste caso, uma boa forma de dizer que a moto azul tem uma curva de potência mais alta que a moto preta – que é o que interessa. O problema é que, em outros casos, essa informação do torque não quer dizer isso, e portanto se torna confusa e enganosa.
Por exemplo, imaginemos uma moto hipotética ideal em que não existam perdas entre o virabrequim e a roda. A motor está rodando a 4000 rpm (419 rad/s), o eixo de entrada na caixa de marchas gira a 125 rad/s, o eixo de saída a 92 rad/s, a roda (que tem raio 0.30m) a 30 rad/s, e a motocicleta se desloca a 32 km/h (9 m/s). Neste caso, a potência no virabrequim é 3 kW, a potência no eixo de entrada é (também) 3 kW, a potência no eixo de saída da caixa de marchas é (pasmem) 3 kW, a potência transmitida para a roda é (surpresa) 3 kW e a potência de propulsão é (ta-da) 3 kW. Logo, como F = P/V, a força de propulsão é de 0.33 kN, força essa que pode ser usada para acelerar a moto, vencer a gravidade, a resistência à rolagem ou o arrasto aerodinâmico. Sempre lembrando que essa é uma moto ideal que usamos só para reforçar o raciocínio. No mundo real, haveria uma perda de cerca de 10% nessa transmissão de potência.
Agora vamos fazer o mesmo raciocínio com o torque. O torque (T=P/w) na saída do virabrequim é de 7 N.m, na entrada da caixa de marcha é 24 N.m, no eixo de saída é 33 N.m e na roda é 100 N.m. Como F = T/R, temos que a força de propulsão é 0.33 kN. Exatamente o que tínhamos determinado pela potência, o que tinha que ocorrer, já que T=P/w. O problema é que, embora a potência não mude (ou mude um pouco quando há perdas na transmissão), o valor do torque é completamente diferente dependendo de onde é medido.
Algumas vezes a análise de uma moto é feita pela força de reação da pista, que é o que empurra a moto para a frente (neste caso F=0.33 kN). Claro que também está certo usar a força, como está certo usar o torque, já que todas essas grandezas são relacionadas (P = Tw = FV = TV/R). A questão neste caso é que fica um pouco mais complicado, nas discussões, ficar toda hora relacionando a força de propulsão na roda com a potência do motor. Melhor falar só da curva da potência e, quando necessário, derivar o torque ou a força a partir dela. Muito embora isso seja uma questão de preferência. Eu, como termodinamicista, prefiro trabalhar só com a potência. O que eu defendo aqui não é o uso da potência sobre o uso do torque ou da força, mas sim usar apenas um dos conceitos nas discussões. Não essa história de que torque é bom para isso, potência é bom para aquilo e força para outra coisa qualquer.
Claro que o torque e a força são importantes para dimensionar os componentes, mas, quando estamos avaliando o comportamento dinâmico e energético do motor e da motocicleta, muito melhor falar só de potência. O torque é completamente desnecessário (T=P/w) e pode ser confuso (você precisa falar de onde ele está sendo medido, ou então informar a rotação).
Mas não quero deixar de lado o argumento de que pode ser interessante falar do torque máximo porque é uma forma de dizer que o motor desenvolve mais potência em rotações mais baixas, como vimos na Figura 4. Será há algum problema em fazer isso? Não para os honestos. O problema é que, como vimos acima, é muito fácil alterar o valor do torque, bastando para isso mudar a relação de transmissão. Então, quando a pessoa fala só do torque, sem dizer em que rotação ele ocorre e sem dizer qual é máxima potência do motor, pode estar querendo te enganar.
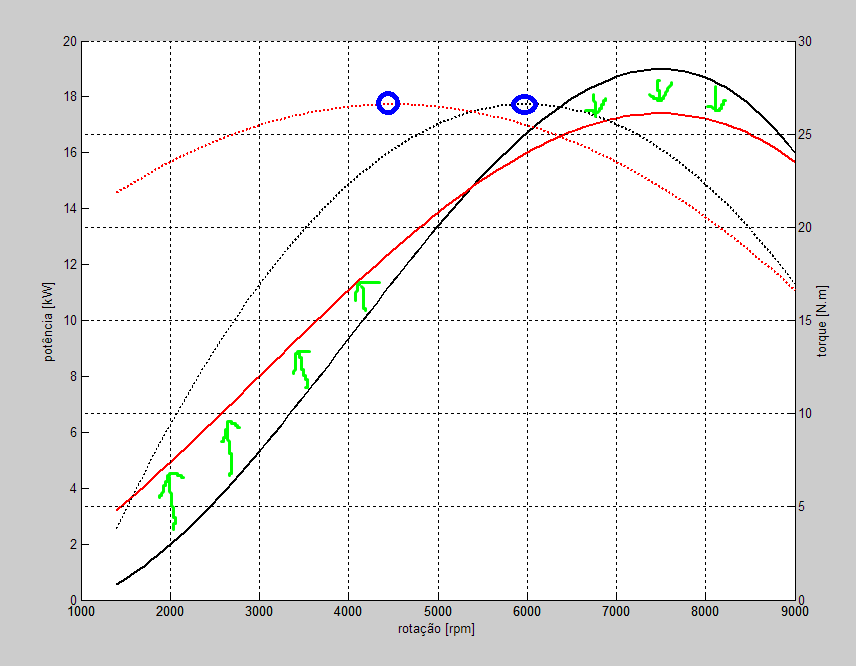
Figura 5: Motores com mesmo torque, mas potências máximas diferentes. Potência representada pelas curvas cheias e torque pelas pontilhadas.
Vejamos os motores das motos na Figura 5. Nesse caso, o dono da moto vermelha mudou o escape, o que fez com que a curva de eficiência volumétrica fosse deslocada para a esquerda e, consequentemente, o torque máximo também fosse para lá. As duas motos têm o mesmo torque máximo agora, mas curvas de potência diferentes. Aqui não é tão fácil descobrir qual das duas motos vai acelerar mais rápido (mesmo sendo iguais), já que em uma faixa de rotação a vermelha tem maior potência, e o contrário ocorre em rotações mais altas. Vai depender muito das relações de marchas utilizadas. Por exemplo, se a relação de marchas permitir que a moto, durante a aceleração, sempre fique na faixa 5500 a 9000 rpm, a moto preta vai acelerar mais rápido. Se a rotação ficar abaixo disso, a moto vermelha vai acelerar mais rápido. Portanto, mesmo que as duas tenham o “mesmo torque” (torque máximo de 26.5 Nm), não dá para dizer qual vai acelerar mais rápido.
Olhando só para a curva de potência, essa mudança (baixar a potência em alta e aumentar a potência em alta) é boa ou ruim? Depende da moto na qual foi instalado o motor e depende de onde a moto vai ser usada (cidade movimentada, plana, com subidas, transporte intermunicipal, trilha, pista, etc.).
Agora vamos pegar um outro motor, o verde mostrado na Figura 6, que tem a “mesma potência” que o motor preto, mas com “mais torque”. Situação parecida com o mostrado na Figura 4, onde claramente a moto com maior torque acelerava mais (porque ali o torque maior significava uma curva de potência mais alta). Mas voltando à moto verde, aqui eu montei uma pegadinha. Isso porque, se eu usar uma relação 5% menor na transmissão final da moto verde, as duas motos terão exatamente o mesmo comportamento. Neste caso, o motor verde tem a “mesma potência” (potência máxima) e “mais torque” (torque máximo), só que não resultará em maior aceleração. Eu poderia até pensar em um caso em que a moto verde tem “mais torque” (torque máximo), mas acelera menos que outra moto.
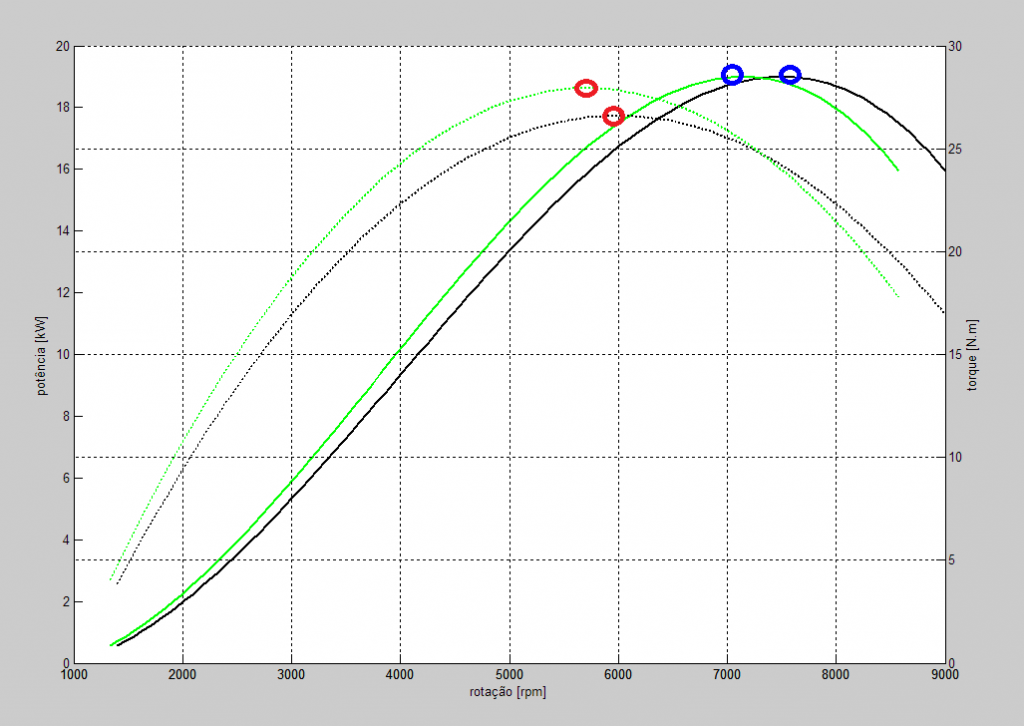
Figura 6: Motores com torques máximos diferentes, mas com a mesma potência máxima. Potência representada pelas curvas cheias e torque pelas pontilhadas.
No final das contas, concluímos que é até compreensível que as fábricas falem sobre potência máxima e torque máximo, com as devidas rotações, pois essa é uma forma compacta de falar sobre a forma da curva de potência. No entanto, essa separação entre torque e potência é desnecessária, pode gerar confusão e, em alguns casos, ser usada como desinformação. Afinal, você já se perguntou porque certas marcas de moto não anunciam a potência máxima, mas apenas o torque máximo de suas motos?
Cada um é cada qual. Se a pessoa quer dizer “torque para acelerar, potência para velocidade final”, tudo bem. Não está errado, embora seja desnecessário, confuso e ocasionalmente desonesto. Eu prefiro dizer “curva de potência para acelerar, potência máxima para velocidade final”. O que importa é a curva de potência.
Mas isso não é tudo, porque essa potência do motor não é usada apenas para acelerar a moto, mas também (e principalmente) para vencer as resistências (gravidade, rolagem e arrasto), como veremos daqui a pouco. O negócio, então, é comparar a potência desenvolvida pelo motor com aquela consumida pelas resistências. O que importa, na realidade, é a diferença entre as duas, pois é só essa sobra de potência que pode ser usada para acelerar a moto.
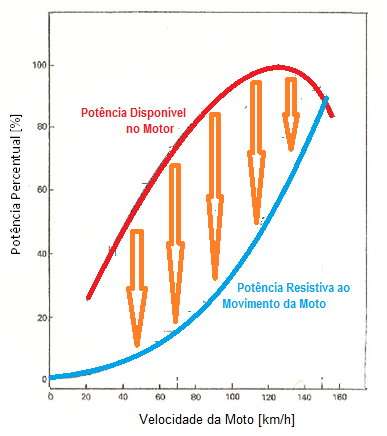
Figura 7: Potência do motor e potência resistiva (adaptado de Heinz Heisler).
A Figura 7 mostra, sobrepostas, a potência do motor e a potência resistiva em um caso sem mudança de marchas (vamos ver isso depois). Para uma boa aceleração precisamos de uma boa diferença entre ambas e de uma moto leve. Uma forma de aumentar a aceleração é aumentar a potência do motor (jeito burro, preguiçoso e enganoso), a outra é diminuir as resistências da moto (jeito inteligente, elegante e honesto). O que nos faz pensar que, muitas vezes, um motor é muito potente não porque a moto tem um bom desempenho, mas sim para compensar uma moto mal projetada. Outra informação interessante na Figura 7 é a velocidade final, por volta dos 145 km/h, onde as duas curvas se encontram e não há mais, portanto, sobra de potência para acelerar.
Por isso, mais importante do que saber a potência do motor da moto é saber qual o seu desempenho, indicado, por exemplo, pelo tempo de aceleração entre duas velocidades e pela sua velocidade máxima. Afinal, de que interessa saber a potência de um motor para um motoqueiro? Quando estou pilotando, o que eu quero saber é quanto a moto acelera, quanto ela corre, quanto ela polui, quanto de segurança ela me proporciona, quanto de agilidade ela tem, quão prática ela é, e quanto ela consome.
Quando vejo uma propaganda de que uma moto é “mais potente” logo penso: putz, essa moto é tão ineficiente que precisaram colocar um motorzão para vencer as resistências. Ou então, quando dizem que tem um tanque maior, automaticamente percebo que se trata de mais uma moto beberrona. Falando sério, o bom é conhecer o desempenho da moto como um todo, não apenas do motor. Para isso servem as competições esportivas. Pena que as motos que participam dessas corridas não são as motos que nos oferecem nas concessionárias. Por isso, na realidade, essas corridas acabam servindo mais como propaganda enganosa do que como informação ao consumidor. O que me lembra de outra música dos Engenheiros do Hawaii: “Corrida pra vender cigarro, cigarro pra vender remédio, remédio pra curar a tosse, tossir, cuspir, jogar pra fora. Corrida pra vender os carros, pneu, cerveja e gasolina. Cabeça pra usar boné, e professar a fé de quem patrocina. Eles querem te vender. Eles querem te comprar.”
3a do Plural – Engenheiros do Hawaii
Outro detalhe muito importante é que a sobra de potência mostrada na Figura 7 não é proporcional só à aceleração, mas sim ao produto da massa, aceleração e velocidade (Psobra = V.m.a). Portanto, se a sobra de potência for de 15 kW a 72 km/h (20 m/s), um conjunto moto/motoqueiro (200 kg) poderá ter sua velocidade acelerada 13.5 km/h a cada segundo (3.75 m/s^2). Se o conjunto pesar o dobro, a aceleração cairá pela metade. Se a velocidade for o dobro, a aceleração também cairá. Por isso, em relação à aceleração, não é muita vantagem aumentar a potência de uma moto se ela também for mais pesada. Para acelerar e para subir, uma moto precisa ser leve. Isso que faz, por exemplo, as motos acelerarem tão mais forte que os carros, mesmo tendo menor potência.
Tem umas motos por aí que são bem avaliadas pelas revistas especializadas porque têm “muito torque”. A questão é que elas têm baixa potência (uma boa curva de potência é que acelera a moto no final das contas), alta resistência aerodinâmica (o que significa pouca sobra para aceleração e também baixa velocidade final) e muito peso (de novo, pouca aceleração, além de alta resistência à rolagem e nas subidas). Como eles fazem a propaganda dessas motos para esconder a sua performance lastimável? “Torque impressionante, presença imponente e tradição americana”. Não falam que a potência, a aceleração e a velocidade final são pífias. Isso sem contar que são motos desconfortáveis, quentes, beberronas e muito pouco ágeis. Só têm torque mesmo, mas em uma rotação muito baixa, o que não serve para nada a não ser vender mais motos. E se você revela que isso não significa nada, apenas uma maquiagem de marketing, ainda tem que escutar que “nós não vendemos motos, vendemos um estilo de vida, vendemos um sonho”. Ai meu saco.
Quando eu comecei a considerar mais seriamente as bicicletas e as motocicletas, misturando um pouco da experiência no dia a dia com termodinâmica e engenharia mecânica e otimização de sistemas térmicos, e juntando isso ao estudo dos relatórios sobre acidentes e críticas às relações trabalhistas, apimentando tudo com filosofia de botequim e sociologia de televisão, eu senti uma forte responsabilidade para contribuir com o trabalho das autoridades, revistas, jornais, fábricas e organizações. Não tive dúvidas, mesmo sabendo que teria que conformar parcialmente minhas ideias ao trabalho que já vinha sendo realizado pelos outros, entrei em contato com mais de uma centena de profissionais. Só que ninguém deu muita bola para o que eu tinha para falar. Por isso, mesmo sem ter sido minha escolha, acabei ficando com bastante tempo livre para pensar sobre as questões bicimotoqueirísticas, e, mais importante, com muita independência (por bem ou por mal) para expressar minhas opiniões. E sabe de uma coisa? Depois de trabalhar tanto tempo praticamente sozinho (ainda bem que tenho ótimas parcerias acadêmicas, literárias e de rua, então nunca estou realmente sozinho), a verdade é que, se eu soubesse antes o que sei agora, faria tudo exatamente igual. Porque no fim, na falta do que fazer, inventei a minha liberdade.
Surfando Karmas & DNA – Engenheiros do Hawaii
Antes de falar especificamente do conjunto motor/motocicleta, queria comentar uma discussão do Bradley (Figura 8), que trata de um outro aspecto importante dos motores. Além da forma da curva e da potência máxima, a faixa de rotação útil também é importante. A questão aqui é que, se tivéssemos infinitas marchas, não precisaríamos nos preocupar com a curva de potência, já que poderíamos trabalhar sempre na rotação da potência máxima, independente da velocidade da moto. Essa é uma vantagem das motos híbridas (mas que têm o problema do peso das baterias) e das transmissões contínuas (mas que por outro lado ainda são ineficientes). Mas voltando à vaca fria, as motos tradicionais tem uma limitação no número de marchas, o que significa que o motor trabalha em várias rotações.
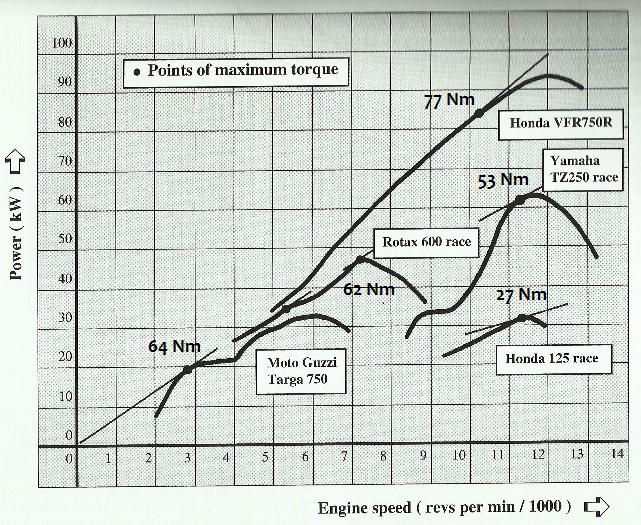
Figura 8: Curvas de vários motores (Bradley)
Por exemplo, compare a curva da Moto Guzzi com a Honda 125. A Moto Guzzi tem “mais que o dobro de torque” que a Honda. Mas isso não significa muita coisa, como vimos, pois a potência das duas é mais ou menos a mesma, cerca de 30 kW. Agora, a faixa de rotação da Moto Guzzi nessa potência é de 4500 a 7000 rpm, o que significa que é possível aumentar a velocidade em mais de 50% com praticamente a mesma potência. Já no caso da Honda, essa faixa é de 11000 a 11800, uma variação de apenas 7%. Portanto, se pudéssemos sempre trabalhar com a mesma rotação do motor, as duas motos teriam o mesmo desempenho. Mas, no mundo real, essa Honda é bastante limitada. Outra diferença é que trabalhar em rotações mais altas aumenta o desgaste e a vibração. Se bem que, se você for olhar que conseguiu a mesma potência com uma moto de 125cc do que outra de 750cc, até que a coisa não é tão ruim assim.
Já a Honda 750 tem um motor inquestionavelmente melhor, pois tem mais potência em toda a faixa de rotação. Mas, será que não é muito pesada? Será que não bebe demais? Será que polui muito? A questão é que não adianta considerar só a curva do motor. Por isso, a partir de agora, vamos dar uma olhada em como é o comportamento do conjunto motor/motocicleta, mas não sem antes lembrar, mais uma vez, que não basta estudar apenas esse conjunto, pois o desempenho (e.g., aceleração, velocidade, consumo, emissões) de uma moto depende principalmente das condições em que é utilizada, i.e., pista e tráfego.
Em resumo:
(1) Torque, força e potência são intercambiáveis (P=Tw=FV=TV/R). Usar as três grandezas em uma discussão é desnecessário, pode gerar confusão e, pior ainda, pode ser usado para enganar as pessoas.
(2) Para prever a dinâmica da motocicleta, precisamos da curva completa de potência do motor, não só a potência máxima. O problema é que as fábricas insistem em informar apenas dois pontos (cada um de uma curva diferente!). Quando você liga para a fábrica, eles dizem que a curva toda é “segredo industrial”. Como assim? Você só pode saber o desempenho da moto depois de comprá-la? Moto Kinder Ovo? Você só descobre o que comprou quando chega em casa?
(3) O que importa mais do que a potência do motor é o acoplamento motor+motocicleta+tráfego+pista. Não adianta nada ter só um motorzão se a moto for mal feita. Aliás, um motor potente em geral significa uma moto vagabunda. Não adianta nada comprar uma moto de 100 HP se 99 HP forem usados para compensar o seu peso e sua ineficiência aerodinâmica. Não adianta nada comprar uma moto de 100 HP para andar na cidade, pois as ruas e o tráfego não permitem usar toda essa potência. O importante é a moto toda, não só o motor.
(4) Mais importante ainda que a curva de potência (ou torque) são os mapas de consumo de combustível e de emissão de poluentes, pois os motoqueiros urbanos estão interessados mesmo é em gastar menos e de não ficarem doentes com a poluição. Claro que as fábricas também não informam esses mapas. Mas isso é compreensível, pois acredito que elas tenham vergonha de documentar as porcarias que são suas motos.
(5) Mas o que importa de verdade, muito além do desperdício de energia, e pau a pau com a emissão de poluentes que mata silenciosamente os cidadãos, é o projeto mal feito das motos, que correm demais e são burras demais e que matam demais. Sim, máquinas podem ser inteligentes, como os aviões, por exemplo. Para diminuir as mortes por acidentes precisamos aumentar a inteligência das motos com o uso da tecnologia de comunicação entre veículos.
Prometo que já vou parar com essa discussão e mostrar o tal modelo dinâmico da moto daqui a pouco, mas, para não deixar o assunto desconexo, deixe-me discutir o comportamento daqueles motores que comentei acima (preto, azul, vermelho e verde) quando são instalados nas motocicletas. Nessa análise, vamos considerar que cada moto teve sua relação final de transmissão escolhida de tal forma que a máxima potência ocorre, na quarta marcha, aos 75 km/h, como pode ser visto na Figura 9.
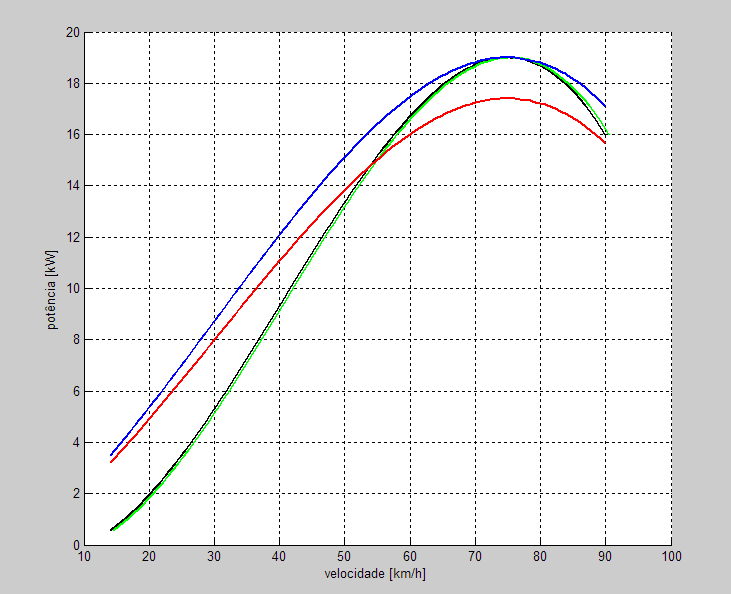
Figura 9: Curva da potência em função da velocidade.
Dá para esperar que a moto azul vai acelerar mais, uma vez que sua potência é mais alta em qualquer velocidade. Quanto aos motores verde e preto, eles são exatamente iguais após a instalação da transmissão apropriada, como eu já havia dito antes. Não importa que o motor verde tenha “mais torque” (28 N.m), o fato é que ele tem exatamente o mesmo comportamento que o motor preto que tem “menos torque” (26.5 N.m). Já o motor vermelho tem maior potência que o motor preto em baixas rotações, mas potência mais baixa nas altas rotações. Esse motor vermelho, com maior potência em rotações baixas, é que é conhecido por aí como tendo “mais torque” (26.5 N.m), porque acelera mais rápido nas largadas, muito embora tenha o mesmo torque máximo que o motor preto (26.5 N.m) e tenha torque máximo menor que o verde (28 N.m).
Só que as motos não podem ser comparadas somente pela Figura 9 (que só mostra o motor em 4a marcha), uma vez que, nas arrancadas (Figura 10) as motos mudam de marcha. Mas pelo menos dá para ter uma boa ideia do que esperar. Vamos então ver o que acontece quando esses motores são instalados nas motos. Afinal, esses não são motores para moer cana, estacionários, mas sim motores usados para movimentar pessoas. A Figura 10 mostra a evolução da velocidade das motos (que neste caso são iguais, com mesma massa e a mesma aerodinâmica) em um percurso de 20 metros para acelerar de 0 a 60 km/h (usando a 2a e 3a marchas). Nitidamente a moto azul é mais rápida, já que tem a potência mais alta em qualquer rotação. Já a vermelha sai na frente da preta, mas logo é alcançada (em velocidade), uma vez que as suas curvas de potência se cruzam. O certo mesmo seria fazer um gráfico de posição versus tempo para ver exatamente quando uma moto ultrapassou a outra (como se estivéssemos em uma corrida, por exemplo), mas esse gráfico de velocidade versus posição é mais apropriado para a nossa discussão.
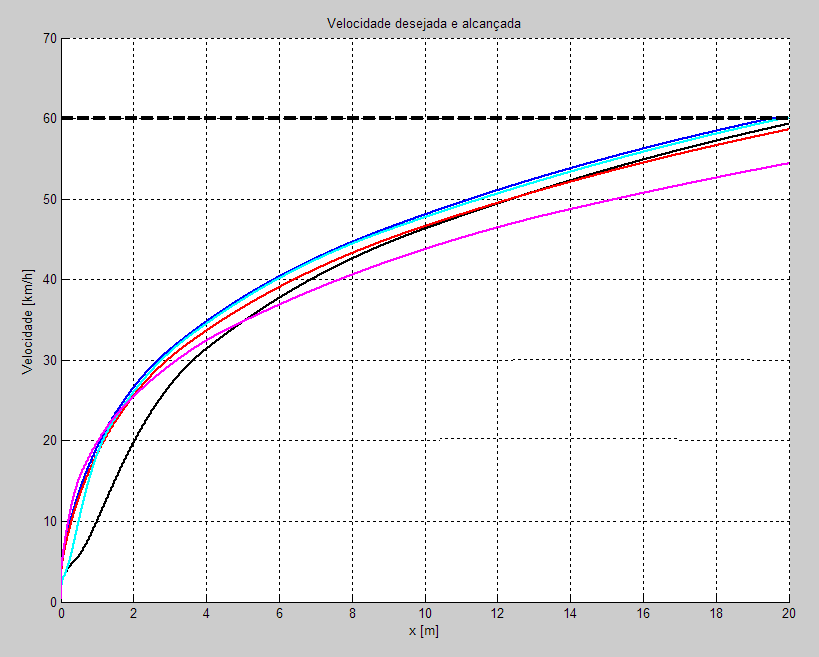
Figura 10: Velocidade das motos nos primeiros 20 metros.
Na Figura 10 dá para ver ainda uma moto lilás, na qual fiz uma mudança parecida com a que fiz na vermelha (deslocar o torque máximo para rotações mais baixas), só que de forma mais exagerada. Nesse caso, o ganho na aceleração inicial é muito pequeno, já que depois de dois metros a moto vermelha a alcança (em velocidade), e depois de cinco metros ela é superada (em velocidade) pela preta. Se bem que o motor lilás pode ser interessante em uma moto tipo trial. Por isso é complicado dizer que uma moto “larga melhor” do que outra, pois isso pode acontecer apenas nos primeiros metros e ser totalmente irrelevante para o uso específico dela.
Nem mostrei a verde, já que é exatamente igual à preta (muito embora tenha “mais torque”). No lugar da verde, testei uma moto azul claro, que tem o mesmo motor que a preta, mas com uma relação final maior (o motor gira 40% mais rápido para a mesma marcha e mesma velocidade da moto), mudança essa que fez milagres na aceleração da moto sem mudar o torque do motor, já que é exatamente o mesmo motor (pô, não era o motor “torcudo” que fazia a moto acelerar?). O interessante é que essa nova moto azul claro, com o motor da preta, consegue um desempenho tão bom quanto a moto azul, que tem potência mais alta. Será um milagre?
O bom mesmo é testar essas motos em outras condições, para ver se a vermelha (“mais torque, menos potência”) continua sendo melhor que a preta, e se a azul claro consegue continuar andando de igual para igual com a azul (que tem maior potência na curva toda). Para isso deixemos as motos tentarem acelerar até 140 km/h, como mostrado na Figura 11. A primeira coisa que vemos é que a vantagem da moto azul em relação à preta quase se desfaz, uma vez que passam a maior parte do tempo na faixa de rotação em que suas potências são bem parecidas (Figura 3). Já a vermelha perde na velocidade final porque nessa faixa de rotação tem potência mais baixa (Figura 5).
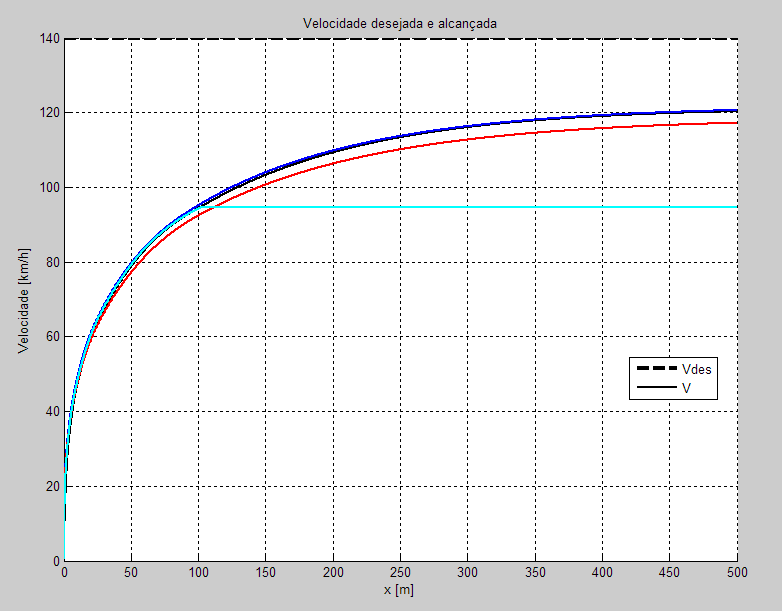
Figura 11: Velocidade das motos nos primeiros 500 metros.
A moto azul claro se dá mal porque a mudança na relação final fez com que a rotação máxima do motor fosse atingida em 5a marcha aos 95 km/h. Ganhamos na arrancada (pois a moto logo chegou à sua rotação de potência mais alta), mas perdemos na final. Uma forma de ter o melhor dos dois mundos (preta e azul claro) seria usar a relação final da azul claro e instalar uma 6a marcha. Essa solução tem lá os seus problemas, como maior custo, maior complexidade, perda de tempo na mudança de marcha (para competidores de arrancada) e cansaço do piloto pela maior frequência de mudanças (no dia a dia).
Mas olhemos agora para o cerne deste texto, que é o modelo matemático da motocicleta. Este também foi desenvolvido em Matlab, em 9 versões sucessivas. Começa com uma função que calcula a potência e o rendimento do motor em função da rotação e da abertura da borboleta; depois vem a entrada de dados do veículo (e.g. coeficiente de rolagem e de arrasto) e da pista (e.g., elevação, vento); uma função que calcula a aceleração a partir da potência; outra bem parecida que calcula a potência a partir da aceleração; a transmissão de potência do motor à roda; condições iniciais; depois a modelagem propriamente da dinâmica da moto; finalmente, vem a inclusão da estratégia de mudança de marchas; gráficos; e a contabilidade final (e.g., consumo, autonomia, velocidade máxima, eficiência do motor, eficiência de propulsão).
A Figura 12 mostra a saída do modelo da motocicleta, com os gráficos que discutiremos em detalhes abaixo. Só para adiantar, as figuras neste exemplo apresentam o que acontece com a moto durante um trajeto de 2000m. Em cada posição da pista, vemos o tempo, velocidade, rotação do motor, marcha, velocidade do vento, inclinação da pista, potência do motor, aceleração da moto, abertura da borboleta, aperto do manete de freio, rendimento instantâneo e consumo instantâneo. A única curva diferente é a última (Fg12: l3-c4), que mostra o que acontece dentro do motor.

Figura 12: Saída gráfica do modelo da motocicleta.
No modelo da motocicleta, as quatro principais entradas são as condições da pista (inclinação e vento), os parâmetros do motor (curva de potência e o mapa de rendimento), parâmetros da moto (massa, coeficiente de arrasto, coeficiente de rolagem) e a velocidade desejada. Neste nosso exemplo, a curva da velocidade desejada foi arbitrária, crescendo linearmente de 30 a 150 km/h. Agora, no mundo real essa curva não é nada arbitrária. Depende da vontade do motoqueiro, das condições do piso, do traçado da pista, do tráfego, e das leis e dos costumes. Esses parâmetros que limitam a velocidade desejada são implementados no modelo do tráfego (MOD_TRAF) que mostrarei outro dia por aqui. A velocidade da moto depende ainda dos limites de tração, de empinamento, de travamento da roda dianteira e de babalu, que ainda não estão modelados no MOD_VEIC.
Portanto, por enquanto, a velocidade é limitada apenas pelas resistências ao movimento (inércia, arrasto, rolagem e gravidade) e pelo coeficiente de atrito na frenagem. Em outras palavras, o movimento é descrito pelo equilíbrio de forças da Equação 1 (Figura 13). Essa equação é a famosa Segunda Lei de Newton: F=m.a (ou m.a=F, para ficar de acordo com a Equação 1).
Figura 13: Equilíbrio de forças na motocicleta (Equação 1).
Quanto maior o valor do lado direito da igualdade, maior será a aceleração da moto. O primeiro termo do lado direito é a força de propulsão (F=eta.P/V), composto pela potência do motor, pela velocidade da moto e pela eficiência de transmissão da potência entre o motor e a roda. O valor da potência do motor, para uma determinada rotação (que por sua vez depende da velocidade da moto e da marcha selecionada), poder variar entre 0 e a máxima potência disponível no motor (e.g., Figura 2). Quem regula esse valor entre o mínimo e o máximo é a abertura da borboleta.
O segundo termo da equação representa o arrasto aerodinâmico, que depende da área frontal, da forma do conjunto moto/motoqueiro e das condições ambientais (temperatura, pressão e velocidade do vento). Por simplicidade, usaremos o fator de arrasto Ka, mas o mais comum por aí é o uso do coeficiente de arrasto Cd. A relação entre os dois é Ka = (1/2).rho.A.Cd (rho=massa específica do ar; A=área frontal do conjunto).
O terceiro termo, resistência de rolagem, representa o esforço que o motor precisa fazer para deformar o pneu (no caso de piso duro) ou para deformar o chão (no caso de areia, terra ou lama). Por último vem a resistência gravitacional.
Interessante que não aparece o torque nessa equação que rege a dinâmica da motocicleta, o que significa que, se conhecermos a potência, não precisamos conhecer o torque, coisa que venho dizendo desde o início. Claro que alguém pode usar a curva de torque, simplesmente substituindo P = Tw, mas daí terá que informar a rotação na qual aquele torque ocorre.
Relembrando, não importa se conhecemos o torque ou a força ou a potência, pois são intercambiáveis, mas sim se conhecemos a curva toda. Mais importante, a Equação 1 mostra muito claramente que a dinâmica da moto não depende apenas da curva do motor, mas também da massa do conjunto, da velocidade do vento, da aerodinâmica, do pneu e das inclinação da pista. Ou seja, o desempenho da moto não depende só do motor, mas também da própria moto. O que deveria ser óbvio, mas parece que não é, haja vista as revistas especializadas que avaliam apenas o motor (e por ora não quero nem discutir se eles sabem fazer isso direito). Agora, importante mesmo é que no mundo real a velocidade é definida por questões de segurança e de tráfego, nem pelo motor, nem pela moto. A não ser nas propagandas, onde nunca há tráfego ou limite de velocidade.
Mas voltemos ao modelo da motocicleta (MOD_VEIC). A entrada principal é composta pela velocidade inicial, a evolução desejada da velocidade, características do motor (MOD_PROP), da pista e da motocicleta. A Equação 1 é discretizada em NX trechos da estrada, onde cada velocidade é calculada a partir da velocidade do trecho anterior usando o método das diferenças finitas. Basicamente, o modelo segue os seguintes passos:
1 – Compara a velocidade do trecho anterior com a velocidade desejada neste trecho, determinando assim a aceleração desejada.
2 – Calcula a potência necessária para alcançar aquela aceleração ou desaceleração desejada (a tal da potência desejada).
3 – Determina a posição da borboleta e do manete de freio para alcançar a potência desejada (que pode não ser alcançada caso o motor não tenha potência suficiente naquela rotação ou caso o pneu não tenha atrito suficiente com o piso).
4 – Calcula a aceleração real da moto (usando a Equação 1) para a potência possível naquelas condições (limitada pelo atrito do pneu e pela curva de potência do motor).
5 – Quantifica a velocidade real neste trecho, a partir da aceleração real.
6 – Determina a nova rotação do motor
7 – Decide se vai mudar de marcha
8 – Volta para o passo 1, para calcular a velocidade no próximo trecho da pista.
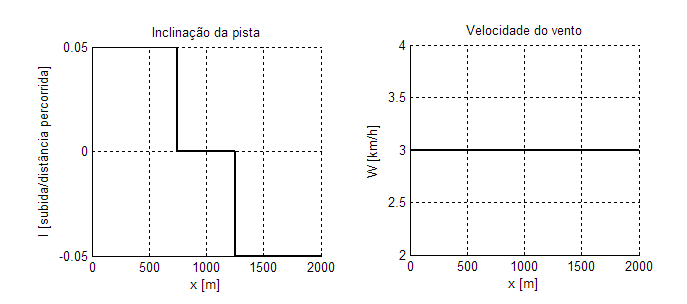
Figura 14: Inclinação da pista e velocidade do vento.
Para explicar um pouco o que o modelo faz, vamos a um exemplo. Só como referência, a moto simulada tem 19 kW – que por coincidência é a potência da minha moto standard (mas as outras características da moto não são iguais). A Figura 14 mostra a inclinação da pista durante o trajeto de dois quilômetros. Nos primeiros 3/8 da pista há uma subida de 50:1000 (50 metros de altura a cada 1000 metros percorridos), depois 2/8 centrais de pista plana, e finalmente 3/8 de descida com inclinação de 50:1000. A velocidade do vento é constante, 3 km/h, sempre soprando contra a motocicleta.
É importante levar em conta a inclinação da rua porque, em cidades com relevo acidentado, uma parte razoável da energia é usada para vencer esses obstáculos. Isso deveria ter fortes implicações na escolha do motor, na transmissão, nos esforços para reduzir o peso do conjunto e na estratégia de mudança de marchas. Peguemos três cidades idealizadas: Ouro Preto (subidas), Recife (muitas paradas por causa dos semáforos, bueiros abertos, buracos e congestionamentos) e Brasília (hipoteticamente sem sinais e com fluxo livre). Em Ouro Preto e Recife a massa da moto é importante (uma por causa da variação da energia potencial e outra por causa da inércia). Já em Brasília a aerodinâmica é mais importante (por causa da maior velocidade). Em Ouro Preto e Brasília as motos andam em velocidades uniformes, já em Recife com grandes variações de velocidade a cada abertura de sinal.
Outro ponto importante é que motoqueiros de verdade têm corpos muito diferentes, coisa que não acontece muito nas competições, onde os pilotos escolhidos são os menores possíveis desde que tenham talento. Motoqueiros reais são diferentes, logo é óbvio que as motos do mercado deveriam vir com potências diferentes, tamanhos diferentes e formas aerodinâmicas diferentes.
Cada tipo de cidade e de motoqueiro precisa de um projeto de moto diferente (e.g., massa, tamanho, forma aerodinâmica, transmissão), sem contar que a estratégia de mudança de marchas também é diferente. Seria muito interessante que as motos standard fossem comercializadas para usos específicos (e.g., estrada de terra, estrada de asfalto, cidade plana, com subida, com muito tráfego, livre, e por aí vai) e para motoqueiros específicos (e.g., magros, gordos, baixos, altos, homens, mulheres – sim, porque homens e mulheres tem corpos diferentes). Mas a verdade é que as motos não são projetadas para os diferentes usos. Vivemos em um oligopólio que oferece motos iguais para todas as situações. Um dia a concorrência de fábricas inteligentes vai acabar com isso, mas bem que o governo podia ajudar com o financiamento do desenvolvimento tecnológico e bem que a mídia especializada podia divulgar essas questões. Se bem que talvez o governo esteja mais preocupado com os impostos que recebe das fábricas, e talvez as revistas estejam mais preocupadas com os anúncios comerciais pagos pelas fábricas. Será que é por isso que as motos são tão vagabundas e perigosas?

Figura 15: Evolução do tempo e da velocidade.
Na Figura 15 vemos como o tempo evolui conforme a moto se desloca na pista. Como a velocidade é cada vez maior, o tempo passa cada vez mais rápido, até que, um pouco depois dos 1.500 metros, a moto não consegue mais acelerar (porque a potência do motor se igualou às resistências ao movimento, não havendo mais sobra de potência para aceleração), fazendo com que a curva se transforme em uma reta.
Mais uma vez é importante dizer que essa tal “velocidade desejada” é uma imposição de vários fatores externos à moto, pois depende da conduta do motoqueiro, do tráfego, da pista, das regras e dos costumes locais. O projeto de uma moto bem feita, portanto, depende tanto da geometria da pista (como discutido na Figura 14) quanto do conhecimento das condições locais do trânsito. É um absurdo que todas as motos standards comercializadas no Brasil tenham o mesmo projeto, independentemente do seu uso. Prometo que vou tentar parar de repetir essas críticas às motos vagabundas e burras que comercializam por aí, mas é irritante ver esse crime ao consumidor passar ileso.
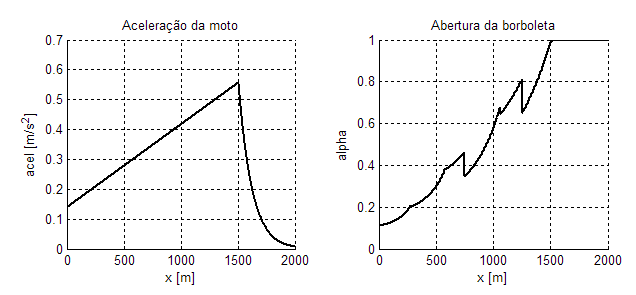
Figura 16: Evolução da aceleração e da abertura da borboleta
Na Figura 16 vemos que até os 1500 metros o motor consegue manter a aceleração desejada, até chegar esse ponto em que, mesmo com a borboleta totalmente aberta, o motor não consegue disponibilizar toda a potência desejada (mais sobre isso abaixo) para manter a aceleração desejada, fazendo com que a velocidade da moto vá caindo até atingir a velocidade máxima. Do lado direito da Figura 16 aparece a evolução da abertura da borboleta durante o percurso. Como tendência geral, cada vez a borboleta abre mais porque precisamos de maior potência. Nos 1500 metros, como esperado, a borboleta está aberta ao máximo, tentando extrair o máximo de potência do motor. Os vales maiores na curva da borboleta ocorrem nos pontos de mudança de inclinação da pista (750 e 1250 m), e as outras oscilações ocorrem nas mudanças de marcha.
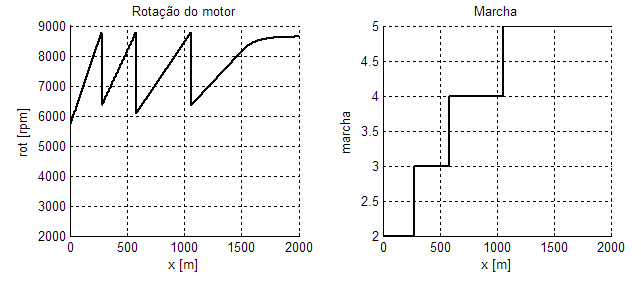
Figura 17: Rotação do motor e mudança de marcha
A Figura 17 mostra as mudanças de marcha da moto durante todo o trajeto. Neste modelo, o motoqueiro sobe a marcha quando a rotação chega a 8800 rpm, o que pode ser visto no gráfico da esquerda. Esse escolha na rotação de mudança de marcha depende do conhecimento da curva do motor e das relações das marchas, das condições do trânsito e também no objetivo do motoqueiro (baixo consumo ou alta aceleração). As quedas repentinas na rotação, no gráfico da esquerda, indicam os pontos de mudança de marcha. Não estamos levando em conta o tempo perdido para cada mudança, o que não é muito importante nas ruas, mas pode ser em uma competição. Outro detalhe é que, embora um número maior de marchas em geral signifique uma melhor performance (sem levar em conta a transição entre as marchas), significa também um maior cansaço para o motoqueiro que fica o dia todo no trânsito. Sem contar o aumento no preço da moto. Questões importantes para se levar em conta no projeto.

Figura 18: Potência real, máxima e desejada.
Uma das curvas que eu mais gosto é a da Figura 18 à esquerda, que mostra as curvas da potência real desenvolvida pelo motor e a máxima potência que o motor poderia entregar naquela rotação se a borboleta estivesse toda aberta. A diferença entre as duas curvas (sobra de potência) indica a capacidade que a moto tem, em cada condição, de acelerar repentinamente para uma ultrapassagem, para vencer uma ladeira, para enfrentar um banco de areia ou então para superar uma lufada de vento contrário.
A curva de potência máxima é a replicação da curva de potência do motor (e.g. Figura 2) para cada uma das marchas. Como eu comentei ali em cima, depois dos 1500 metros, as duas curvas se encontram, o que significa que o motor não tem mais sobra para acelerar o desejado (continua acelerando um pouco neste caso até atingir a velocidade máxima, já que a potência desejada, como calculada, leva em conta a aceleração desejada). Outro ponto importante é que, acima dos 7500 rpm, conforme a velocidade aumenta (e também aumenta consequentemente a rotação do motor), a potência do motor cai. Talvez pudéssemos escolher a relação da última marcha para que a velocidade máxima coincidisse com a potência máxima, mas devemos lembrar que isso teria implicações na sobra de potência em velocidades mais baixas (aceleração até a velocidade máxima) e também que neste caso a moto está em uma descida.
A curva à direita mostra a potência necessária (desejada) para realizar a curva de velocidade desejada. Importante observar que ela está em uma escala diferente da curva da esquerda. Ali também fica claro que, a partir dos 1500 m, a moto não tem mais condições de realizar o desejado. Para isso seria necessário aumentar a potência do motor (solução burra) ou diminuir as resistências da moto (solução inteligente).
Em geral, as fábricas, em suas propagandas, dão muita ênfase ao aumento da potência do motor, nunca à melhoria na eficiência da moto, o que seria bem mais inteligente e honesto. Isso cria essa cultura de culto à potência do motor, independentemente se ele está instalado em uma moto bem ou mal projetada. As comparações reais de desempenho dinâmico e de consumo devem ser feitas em ensaios e competições que simulem o uso real das motos. Se bem que já seria uma boa melhora se tivéssemos acesso à curva de potência, mapa de consumo, coeficiente de arrasto, coeficiente de rolagem e peso da moto. No mínimo, as fábricas poderiam disponibilizar o tempo para acelerar entre várias velocidades, a velocidade máxima da moto (que diz muito sobre a aerodinâmica inclusive em baixas velocidades) e o consumo em várias condições (velocidades constantes, acelerações e subidas).

Figura 19: Rendimento e consumo instantâneo do motor
Deixando um pouco o desempenho de lado, vamos agora dar uma olhada no rendimento do motor. Dá para ver que (Figura 19) ele varia durante o percurso. Isso acontece porque o rendimento do motor depende tanto da rotação quanto da abertura da borboleta. Outra informação importante é o consumo instantâneo do motor, que varia tanto porque o rendimento está mudando quanto porque a moto está exigindo uma maior potência conforme a velocidade aumenta.
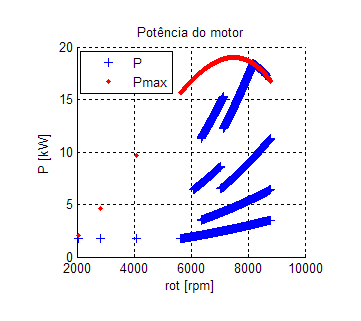
Figura 20: Potência real e máxima em função da rotação do motor
A outra curva entre as minhas preferidas é a mostrada na Figura 20, que é bem parecida com a Figura 18 (esquerda), mas agora vista só do ponto de vista do motor. Matematicamente, a única coisa que fizemos foi agora mostrar a potência em função da rotação do motor, não mais da velocidade da moto. A curva enfatiza dois fatos importantes do uso de motores no mundo real. A rotação do motor varia durante o uso, e por isso precisamos conhecer toda a curva, não apenas os pontos de torque máximo e de potência máxima. Também, dificilmente usamos a potência máxima do motor, o que significa que em geral trabalhamos com rendimento abaixo do que poderíamos ter caso a moto tivesse sido bem selecionada. O que significa também que não precisamos de motos tão caras e pesadas.
Em outras palavras, resumindo os últimos parágrafos, a escolha da moto ideal, tanto em relação ao desempenho quanto ao consumo, depende do uso que você vai fazer dela. Aceleração constante ou velocidade uniforme? Estrada ou cidade? Subidas e descidas, ou um percurso plano? Muito vento?
Seria mais fácil, como todo mundo faz, analisar apenas as motos que vendem mais e aceitar que são realmente “modernas”. Mas é que nós não vemos graça nas gracinhas das propagandas e morremos de rir nos discursos das autoridades. Sabemos que não é bem assim. Por isso, usaremos daqui em diante nossos modelinhos para mostrar como um mesmo motor pode ter comportamentos tão diferentes no mundo real. Veremos então como seriam as coisas se as fábricas fossem minimamente competentes para usar a tecnologia que já foi desenvolvida.
Outras Frequências – Engenheiros do Hawaii
Tudo muito bom, tudo muito bem, já entendemos como esses modelos funcionam, agora vamos ver para que servem. Com um modelinho simples como esses, podemos estimar qualitativamente o que acontecerá dependendo da condição de uso de uma determinada moto. Como dito antes, as eventuais falhas do modelo usado para a motocicleta não estão no modelo em si, mas sim na baixa qualidade dos dados alimentados (curva de motor genérica, coeficiente de arrasto genérico e por aí vai). Mas pode confiar nas conclusões gerais, pois o modelo é confiável dentro da ordem de grandeza dos resultados.
A Figura 21 mostra alguns resultados obtidos quando rodamos o modelo em várias condições diferentes. A primeira parada é no que eu chamei de ‘caso base’ (1), que servirá como base (oh!) de comparação para as outras condições. Neste caso, usamos uma moto de 15 kW (20 CV), com massa de 130 kg (o piloto tem outros 70 kg), rodando no plano, com coeficiente de arrasto 0.4, em velocidade constante de 50 km/h. Nessas condições a moto fez uma média de 47 km/l. Quer dizer, a moto consome um litro de gasolina a cada 47 km percorridos. Imaginando que esse motoqueiro roda em média 100 km por dia, o seu gasto mensal com gasolina será de R$ 161.
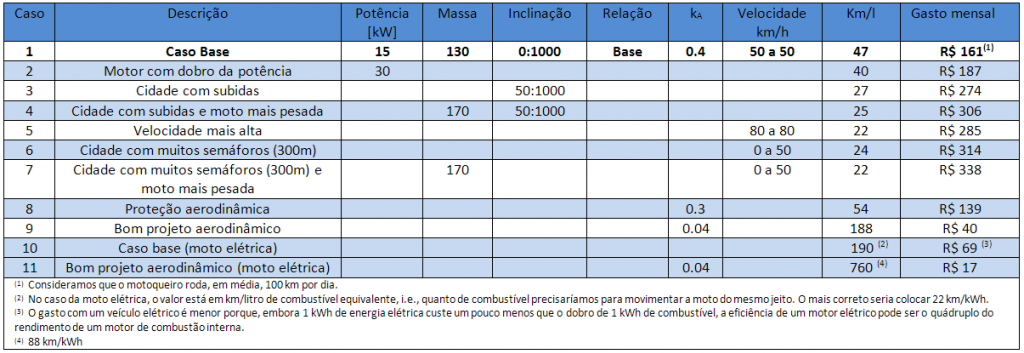
Figura 21: Consumo da motocicleta em diversas condições de uso
Não estamos contando aqui os gastos do indivíduo com o pagamento da moto, manutenção, óleo lubrificante, taxas, impostos, estacionamento, pedágio, seguro e multas; nem tampouco os gastos sociais com a construção das ruas, propinas, corrupção, subsidio estatal à pesquisa, perdão de dívidas trabalhistas, diminuição de impostos, zonas francas, infraestrutura pública de parques industriais, manipulação do câmbio, manutenção da ordem, protecionismo alfandegário, custo Brasil, lucro Brasil, produção, distribuição, comercialização e limpeza dos efeitos do uso de combustíveis, tratamento médico com acidentados e contaminados pela poluição, e pensão tanto aos parentes dos mortos quanto aos feridos.
Façamos agora algumas variações no caso base para ver o impacto sobre os gastos mensais com combustível. No estudo 2, usamos uma moto com o dobro da potência máxima, mas com exatamente a mesma construção. Dessa forma, as resistências ao movimento serão exatamente as mesmas. Por que então a moto passou a fazer 40 km/l? Porque agora o motor trabalha em uma condição menos eficiente do que antes. Nos dois casos, como as motos são iguais, a potência mecânica para a propulsão é de 1.7 kW. A questão é que isso significa 11% da potência nominal no caso base, e 5.5% no caso 2, o que faz com que a moto mais potente opere em uma faixa de maior consumo específico. Nesse segundo caso, a média cai para 40 km/l, representando um aumento nos gastos de R$ 26 por mês.
Outra conclusão interessante é que, para rodar a 50 km/h, mesmo com uma moto mal projetada como as que temos por aí (pesadas e com péssima aerodinâmica), não precisamos de tanta potência. Se essa moto tivesse 3 kW, a economia seria bem maior, sem contar o menor preço de aquisição.
O que nos faz perguntar quem ganha com essas motos com potência tão alta que rodam em nossas cidades. Afinal, no Recife é quase impossível rodar a mais de 50 km/h, sem contar que é muito perigoso. Com motos mais potentes que o necessário ganham as fábricas que lucram mais, os bancos que financiam mais, a indústria do petróleo que vende mais, e o governo que arrecada mais. Será que agora ficou claro porque as motos comuns de rua têm potência tão mais alta que o necessário?
O caso 3 tem como diferença as subidas da cidade. Neste caso, 50 metros de elevação a cada um quilometro percorrido. A média diminui violentamente, passando para 27 km/l, o que significa um aumento de 70% no gasto mensal com combustível. Outro detalhe é que, embora o peso de uma moto não seja muito importante em velocidade constante no plano, certamente é no caso de cidades com topografia variável. No caso 4, uma moto mais pesada diminui a média para 25 km/l.
Outro estudo interessante é ver o efeito da velocidade sobre o consumo. No caso base (1) a velocidade era de 50 km/h, com uma média de 47 km/l. No caso 5 aumentamos a velocidade para 80 km/h, o que fez a média diminuir para 22 km/l. Para quem quer economizar, faz muita diferença andar mais devagar, principalmente porque as nossas motos têm aerodinâmica horrível, basicamente a mesma de 129 anos atrás, quando foram inventadas. A primeira moto da história, em 1885, tinha Ka=0.40. As motos standard vendidas nas concessionárias hoje em dia têm Ka=0.42. Isso posto, fica a questão se essas fabriquetas atuais são embusteiras ou lesadas.
O pior ainda vem por aí, pois na realidade as nossas motos não andam em velocidade constante, mas precisam ser aceleradas e freadas constantemente por causa do tráfego e dos cruzamentos. No caso 6, imaginamos uma moto que precisa acelerar de 0 a 50 km/h a cada 300 metros (Hellcife!). Nesse caso, muito embora a velocidade média seja a metade do caso base, o consumo é muito maior. Se o carinha andasse sempre a 50 km/h gastaria R$ 161 por mês. Tendo que acelerar o tempo todo, o gasto vai para R$ 314. Se a moto for mais pesada, como no caso 7, o gasto mensal vai para R$ 338!
Vejamos agora como o mundo seria se as motos fossem bem feitas. No caso 8 melhoramos a aerodinâmica só um pouco, com uma pequena carenagem e posição mais favorável. A performance energética vai para 54 km/l.
Já no caso 9 pensamos em uma moto com aerodinâmica quase perfeita. Claro que essa aerodinâmica traria problemas com custos, instabilidade em rajadas laterais, perigo no caso de acidentes e outros problemas. Mas nada que não possa ser resolvido com a capacidade de engenharia que as fábricas dizem ter. Ou então, gastando menos em propaganda e mais em desenvolvimento tecnológico. O que importa, nesta discussão, é saber qual seria o consumo da moto se ela fosse bem feita. A autonomia nesse caso passaria para 188 km/litro, com um gasto mensal de combustível de apenas R$ 40.
Agora, será que é possível ter um arrasto aerodinâmico tão baixo? Sim. Há 61 anos atrás, uma NSU de 50cc (9.7 kW) alcançou velocidade de 195 km/h, o que significa um coeficiente de arrasto (Ka) de cerca de 0.09. Segundo o Cossalter, uma moto sem carenagem e com o motoqueiro em posição ereta tem algo como Ka=0.42, enquanto uma moto do MotoGP tem Ka = 0.13. Ainda segundo ele, a área frontal de uma moto 125cc de competição chega a 0.28 m2. Logo, com um perfil de aerodinâmico (Cd=0.04), essas motos teriam Ka=0.007.
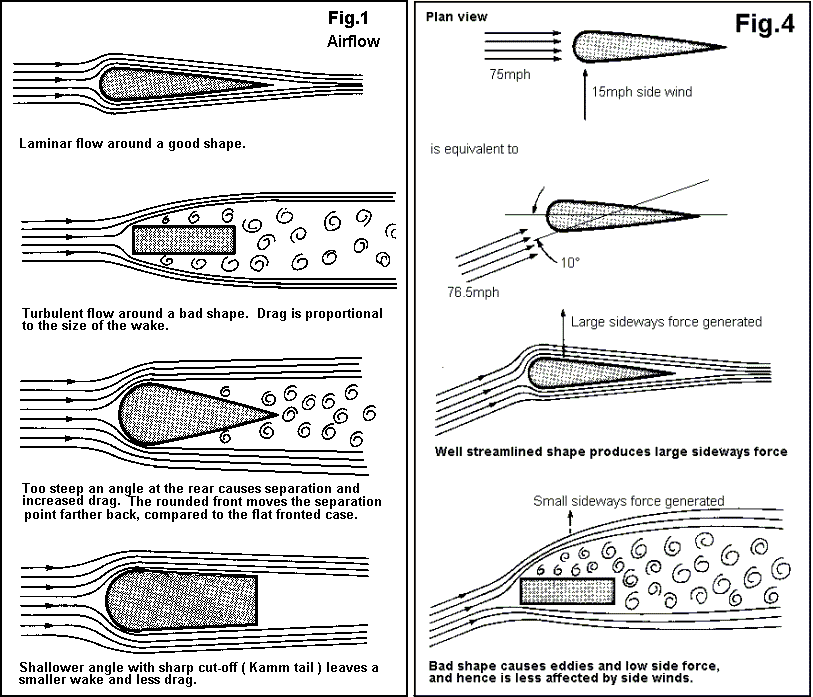
Figura 22: Aerodinâmica (Foale)
Logo, é possível sim ter uma boa aerodinâmica. Não é fácil, claro, pois, como mostrado na Figura 22, perfis aerodinâmicos têm problemas com ventos laterais, instabilidade em altas velocidades e apresentam risco ao condutor no caso de quedas. Só que as fábricas já tiveram mais de 120 anos para resolver isso. Em 1953, aquela NSU tinha um arrasto aerodinâmico de apenas 20% do apresentado pelas motos standard que são oferecidas para a gente nas concessionárias. As fábricas sabem sim melhorar o projeto das motos, mas parece ser mais fácil aumentar a potência do motor, não é? Afinal, não são eles que pagam o combustível e que morrem com a poluição. Além disso, o lucro (com vendas de motos e de combustível) e o recolhimento de impostos (receita do governo) são mais altos com motos mais potentes. Será essa a razão para não apostarem na melhoria da aerodinâmica das motos?
Todos os estudos anteriores foram feitos sobre motos movidas por motores de combustão interna, mas o modelo do veículo pode ser usado também por motores elétricos ou corpos humanos (ciclistas), já que todos têm uma curva de potência em função da rotação. Corpos humanos e motores de combustão interna têm praticamente o mesmo rendimento, por volta dos 20%. Já um sistema com motor elétrico pode ter rendimento muito maior, acima dos 80%.
Para estudar essa modificação no sistema de propulsão, no caso 10 usamos a mesma moto e as mesmas condições do caso base, mas agora com um motor elétrico. Nesse caso, a quilometragem média da moto seria de 22 km/kWh, ou R$ 69 por mês. Uma outra forma de fazer a comparação é usar litros equivalentes de combustível, que é a quantidade que precisaríamos para realizar o mesmo trabalho. Neste caso, como o motor elétrico tem o quádruplo da eficiência do MCI, obviamente sua quilometragem também é quadruplicada, passando para 190 km/l (equivalentes). Fazendo a mesma brincadeira, mas agora colocando um motor elétrico na moto com boa aerodinâmica, poderíamos ter um conjunto (caso 11) que faz 760 km/l.
Claro que esses são valores bastante distantes da nossa realidade, mas são possíveis. E poderiam ser possíveis já hoje em dia se as fábricas empregassem a tecnologia existente. O truque deles, no entanto, é fazer pequenas mudanças nos motores e dizer que conseguiram mudanças fantásticas. Como assim? Simples, se um veículo pode fazer 760 km/l, o aumento de 30 km/l para 35 km/l não quer dizer nada. Isso é esmola.
Uma outra tecnologia interessante dos veículos elétricos são os freios regenerativos, que reaproveitam a energia cinética no momento da frenagem. Se bem que qualquer modificação sempre tem que ser muito bem feita nas motos, pois não queremos aumentar o seu peso e volume. Mas isso não significa que é impossível, apenas que é mais difícil. Bem, talvez seja impossível para essas fábricas atuais que insistem em projetos antigos. Para dizer a verdade, eu nunca consigo decidir se as fábricas atuais são enganadoras ou simplesmente incompetentes.
Outro problema dos veículos elétricos é o peso das baterias. 1 kWh útil de gasolina pesa 0.4 kg. Já 1 kWh útil de energia elétrica pesa 6.7 kg. Se bem que isso é um pouco atenuado porque, por outro lado, os motores de combustão interna são mais pesados que os elétricos. Outra limitação dos veículos elétricos é a geração, distribuição e tempo de carregamento. É preciso de uma grande infraestrutura. Não nos esqueçamos, no entanto, que para a gasolina (prospecção, manutenção da ordem, refino, distribuição, propinas, corrupção e mitigação dos males da poluição) também é necessária uma imensa estrutura pela qual pagamos muito caro.
De qualquer forma, o lance das fábricas, nesses casos, é comparar o motor de uma moto vagabunda com outra vagabunda. Por exemplo, considere uma moto de 15 kW rodando a 50 km/h que sobe uma elevação de 100 m durante um percurso de dois quilômetros. Durante o percurso, o motor tem um rendimento (energia mecânica no eixo dividida pela energia do combustível) de 22%, o que corresponde a uma média de 27 km/l. Digamos que eles façam uma mudança no motor e melhorem o rendimento para 23%. Nesse caso, a moto passaria a fazer 28 km/l. O setor de marketing diria que houve uma melhoria de 4% (28/27) na autonomia da moto. Que maravilha. Será?
Façamos as contas com mais honestidade. Lembremos que o objetivo da moto é mover o piloto. Logo, o trabalho útil não é a potência mecânica no eixo do motor, mas sim a energia útil (cinética ou potencial) transferida ao piloto. Portanto, a eficiência de propulsão (energia transferida ao piloto dividida pela energia do combustível) no caso original era de 3%. Ao melhorar o motor, esse rendimento passou para 3.1%. Um aumento, então, de apenas 0.1%. Quarenta vezes menor do que o anunciado pela propaganda. Sim, é possível mentir com números verdadeiros.
Mas estou aqui comparando com o ideal, o que pode parecer injusto. Pensemos então não no ideal, mas no possível neste momento, com a tecnologia existente: uma moto com boa aerodinâmica, baixa resistência de rolagem, baixo atrito interno, leve e com motor elétrico. Neste caso, a moto poderia fazer 340 km/litro (equivalentes), com uma eficiência de propulsão de 37% – um aumento de 10 vezes em relação às porcarias que temos por aí. A enganação das fábricas é comparar uma porcaria com outra. Agora, se compararmos essas porcarias com o que seria possível se usassem o que há de melhor, percebemos então claramente como estamos sendo enganados, e como as pequenas mudanças que eles propõem ano a ano são meras migalhas pintadas de dourado. Abusam de nós motoqueiros com esse oligopólio burro e mortal, como se fôssemos otários. Não somos otários, estamos apenas reunindo nossas forças. Não sabem com quem estão brincando. Essas motos ineficientes e inseguras nos tiram o dinheiro e a vida, nos deixam sem nada. A questão é que os mais perigosos dos homens são exatamente aqueles que não têm nada a perder.
Dom Quixote – Engenheiros do Hawaii
O importante é sempre lembrar que não necessariamente as grandes empresas têm grandes empresários e nem sempre as grandes organizações têm grandes líderes. As motos que estão no mercado são criminosamente mal feitas. Tudo bem, até pode ser que os dragões sejam moinhos de vento, que sejamos otários, mas a verdade é que estamos aqui ao dispor de quem quiser lutar pelas nobres causas motoqueirísticas: motos mais seguras, mais limpas, mais práticas, mais baratas, mais maneiras, mais inteligentes, mais democráticas e mais divertidas. Porque, para falar a verdade, o que mais me incomoda nas fábricas atuais não é a ganância ou a maldade, mas sim a burrice e a incompetência.
Claro que muitas características das motos são subjetivas, como a dirigibilidade (handling), ou então de difícil medição, como sua capacidade de se prender ao chão (roadholding). Outro problema é levantar as condições em que a moto será usada, como ondulações na pista e o atrito da pista com o pneu. Essas condições certamente dificultam a análise das motocicletas.
No entanto, outras condições podem ser estatisticamente levantadas, como as condições topográficas e de tráfego de uma cidade, o que permite sim fazer uma boa seleção para a moto indicada para tais condições. Sem contar que alguns ensaios simples podem ser realizados para compararmos as motos, como a curva de potência, o mapa de consumo específico, a aceleração entre duas velocidades, velocidade máxima (que diz muito sobre a eficiência aerodinâmica da moto mesmo em baixas velocidades), limite de tração, consumo em condições controladas, consumo em condições de tráfego.
As fábricas têm essas informações, oremos que sim, mas não querem publicar. Creio que seria interessante que isso fosse exigido pelo código do consumidor ou então levantado por institutos independentes em condições reais de tráfego (e.g., aceleração e desaceleração, vento contrário, subidas), com a comparação com protótipos possíveis com a tecnologia atual, para desmascarar o grande embuste do que estão nos vendendo. Também seria interessante termos competições com motos comuns, mas isso é algo que nós os consumidores temos que exigir. Já pensou se uma “moto chinesa” ganha uma corrida contra uma “moto japonesa”, jogando no lixo a lenda urbana de que são mais vagabundas que as outras? Ou então se uma moto elétrica ganha uma corrida contra uma moto com motor de combustão interna? Não sei o que as pequenas fábricas estão esperando para patrocinar essas competições simples mas revolucionárias.
Espero que essa pequena brincadeira que fizemos com esses modelinhos simples não tenha ofendido ninguém (só quem merece) e tenha ajudado a compreender que (1) precisamos conhecer a curva de potência do motor completa, não apenas pontos específicos, (2) modelos (e.g., equações, pacotes computacionais, dinamômetros, competições, túneis de vento, testes normatizados) são fundamentais na análise das motocicletas, mas é preciso tomar muito cuidado com as conclusões deles extraídas, (3) o comportamento da moto depende não só do motor, mas da motocicleta como um todo, bem como das condições em que será usada, e (4) as motos possíveis são muito muito muito melhores do que as porcarias que andam nos oferecendo.
No mais, embora este tenha sido um texto bem técnico, quero falar mais uma vez que o desempenho de uma moto, embora importante, não é o único parâmetro para avaliarmos o mundo das duas rodas, pois temos uma série de problemas (e.g., acidentes, congestionamentos, poluição, desperdício, exploração trabalhista, e oligopólio das fábricas de veículos, dos partidos políticos e das produtoras de combustível) e oportunidades (e.g., mobilidade, inclusão social, desenvolvimento da economia local e expressão cultural). É fundamental que sempre olhemos para as motos desses vários pontos de vista.
Para terminar, quero fazer uma última confissão, pois ao escrever este texto eu “li os símbolos sagrados de umbanda, fui criança prá poder dançar ciranda, e quando todos praguejavam contra o frio eu fiz a cama na varanda. Eu fui testemunha do amor de Rapunzel, eu vi a estrela de Davi brilhar no céu, e pr’aquele que provar que eu estou mentindo eu tiro o meu chapéu”. Porque afinal, exatamente por causa dos nossos erros é que sabemos que somos o que dá pra fazer, o que não dá pra evitar, e não se pode esconder.
3×4 – Engenheiros do Hawaii
— FIM —
Leitura Adicional
Volta e meia alguém entra em contato pedindo dicas para estudar as motocicletas. Há muitos livros, teses, artigos e relatórios disponíveis, fazendo com que uma única vida seja pouco para tanto aprender. Ainda bem que temos muitas vidas, pois há muitas pessoas interessadas na mudança das motocicletas. Com cada um estudando um pouco, calculando um pouco, fabricando um pouco, e testando um pouco, um dia mudamos esta situação para melhor. A lista a seguir é praticamente só técnica, mas nunca nos esqueçamos que tão, ou mais, importante que a técnica é a cultura, a economia e a política, que quase sempre ditam os rumos do desenvolvimento tecnológico.
Para começar, tenho o costume de registrar aqui no JEDR os livros da minha biblioteca particular em várias listas: Livros de Moto, com seções sobre viagens, ficção, pilotagem, mecânica, crônicas, histórias, imagens, cultura, filosofia, bikers, tecnologia e engenharia; Livros de Bicicleta, dividida em ciência, tecnologia, cultura, ciclismo, história, bicicletismo urbano, política e viagens; e Livros Técnicos e Acadêmicos, com obras importantes para o estudo dos veículos de duas rodas, mas sem falar especificamente deles, com motores de combustão interna, dinâmica veicular, outros veículos, mobilidade, cidades, preparo físico, ciências térmicas, combustão, mecanismos, química, desenho, fabricação, eletricidade, China (maior fabricante de motos e bicicletas do mundo), economia, mídia e assuntos gerais; e Artigos e Teses, com trabalhos organizados em teses, dissertações, monografias, trabalhos de conclusão de curso, relatórios, papers, bancos de dados, mecanismos de busca e definições.
Além de listar os meus livros, quando dá tempo escrevo algo sobre eles, como na seção Comentários Sobre Livros, com uma coletânea de textos em que uso as minhas leituras como mote para desenvolver a minha posição sobre o motoqueirismo e o bicicletismo; e a seção Engenharia da Bicicleta e da Motocicleta, que mistura textos sobre livros técnicos e algumas pequenas apresentações teóricas (sem qualquer pretensão) sobre motores, bicicletas e motocicletas.
Agora, mais importante do que os aspectos científicos e tecnológicos deste texto, é sempre bom lembrar a conjuntura em que vivemos. Há uma série de textos básicos onde tento deixar clara a minha visão sobre a relação entre a política, ciência, sociedade e tecnologia. Por exemplo, A Motocicleta e as Ciências Exatas, onde falei pela primeira vez na ideia de usar as motos em um plano para incentivar os jovens a gostarem das ciências exatas. Engenharia da Motocicleta foi a versão inicial deste apêndice, no qual comentei vários livros básicos para aqueles que quiserem entrar nesta área. O que custa menos: carro, moto, ônibus ou bicicleta? discute como comparar os vários modais de transporte urbano. Bicicletismo Urbano – Velocidade Efetiva é a continuação do texto acima, com um novo índice para ajudar nas comparações. A Economia Mundial das Motos apresenta dados sobre mercado e acidentes de moto ao redor do mundo, com uma discussão importante sobre o que devemos aprender com os outros países que já viveram ou que vivem nossos problemas. Motos na Imprensa surgiu quando comecei a fazer um levantamento na imprensa mundial para ver como as motos eram tratadas. Parece que no jornalismo também podemos aprender muito com os outros. Motos Que Carregam o Mundo segue um pouco na mesma linha dos textos anteriores, mas com destaque ao Vietnã e ao Cambodia, principalmente em como o povo daqueles países consegue usar de forma tão inteligente as motos. Reflexões de um Motoqueiro Sobre Colisões, Quedas e Atropelamentos fala das várias causas de acidentes de moto e o que podemos fazer para começar a reduzir esse número. A Moto do Futuro traz uma série de pensamentos sobre como nossas motos são ruins e o como poderiam ser. O mesmo em A Moto do Sertão, mas daí me concentrando mais no uso rural. Propulsão de Bicicletas e Motocicletas tem tudo a ver com o presente texto, pois fala da disciplina para a qual estes modelinhos foram originalmente organizados. Navegando Pelas Ruas, Imagens e Palavras reflete sobre o uso de navegadores por GPS no tráfego, com suas oportunidades e seus perigos. Outro texto afim ao presente é Dinâmica da Bicicleta – Performance Cycling, no qual usei uma primeira versão deste MOD_VEIC, mas naquele caso para estudar as bicicletas. Por último, e talvez o meu texto preferido, vem Motoqueiros em Fuga, que é uma espécie de manifesto político, filosófico, sociológico e científico do motoqueirismo.
Para quem nunca leu nada sobre os motores de combustão interna, há três textos bem simplórios aqui no JEDR. Um bem geral sobre os Motores 4 Tempos, outro discutindo a função do Avanço da Centelha e um terceiro um pouco mais elaborado sobre a Influência das Válvulas na curva de potência do motor. Esse último, em particular, pode ser usado como o modelo do motor (MOD_PROP) que alimenta o modelo do veículo (MOD_VEIC).
Procurando algo mais sério, mas ainda introdutório, recomendo os seguintes livros: Engine Testing: Theory and Practice, sobre testes de motores nos mais diversos tipos de dinamômetros; Vehicular Engine Design, com várias discussões importantes sobre as escolhas durante o projeto de um motor de combustão interna; Design and Simulation of Four Stroke Engines, o livro clássico do Prof. Blair sobre a modelagem de motores de quatros tempos; Four-Stroke Performance Tuning, que complementa o pouco que discutimos teoricamente por aqui, já que apresenta uma discussão prática de como ajustar motores visando a performance em competições; Internal Combustion Engine Fundamentals, simplesmente o Novo Testamento dos motores de combustão interna (o Taylor é o Velho Testamento); Introduction to Modeling and Control of Internal Combustion Engine Systems e Vehicle Propulsion Systems, com modelos básicos de MCI, controle, sistemas híbridos e com célula combustível; Air Pollution and Global Warming: History, Science, and Solutions, que traz uma discussão muito bem integrada da formação de poluentes, seus efeitos e como diminuí-los; Aerodynamics of Road Vehicles, sobre a aerodinâmica de veículos terrestres, inclusive com um capítulo sobre motocicletas; e Princípios da Quimica, para entender a conversão energética durante a queima e a formação de poluentes.
Não há muitos livros sobre engenharia da motocicleta por aí, mas os poucos que existem são muito bons. Quem quiser estudar a física das motos tem que obrigatoriamente montar esta biblioteca. Motorcycle Dynamics (COSSALTER) é a bíblia da teoria da ciclística das motos, mas não tem quase nada sobre motores ou sobre motos no mundo real. The Racing Motorcycle: A Technical Guide for Constructors (BRADLEY) é o mais básico de todos, mas com uma visão geral muito interessante, baseada na experiência. Muita coisa deste texto veio das ideias do Bradley. Motorcycle Handling and Chassis Design: the Art and Science (FOALE) é o complemento perfeito do Cossalter, com muitas discussões práticas, mas também com pouca coisa de motores. Sportbike Performance Handbook (CAMERON) é de um jornalista, escritor e fabricante de motos de competição, combinação que cria uma voz única no mundo das motocicletas. Motorcycle Design and Technology (COCCO) é um livro com teoria básica, mas com visão bem prática. Junto com o Bradley, pode ser usado em um curso introdutório à engenharia da motocicleta. Modelling, Simulation and Control of Two-Wheeled Vehicles acabou de chegar na minha biblioteca, então não tive tempo para avaliar direito, mas tem um conteúdo interessante sobre a modelagem da motocicleta e do motoqueiro, além da parte de controle. Vehicle Dynamics: Theory and Application e Motor Vehicle Dynamics não são sobre motos, e talvez não sejam os melhores do ramo, mas sempre é bom dar uma olhada nos textos feitos para automóveis, pois em geral têm uma boa qualidade técnica, muito embora tenham também péssimo gosto para escolher o objeto de estudo.
Os livros das últimas duas seções são bem matemáticos, e por isso precisam simplificar bastante o objeto de estudo. Obras sem essa preocupação analítica podem se dar ao direito de detalhar melhor as motos reais. The Grand Prix Motorcycles (CAMERON), de novo o Cameron, conta a história das motos de velocidade (GrandPrix) de 1949 a 2008. MotoGP Technology (SPALDING) vem com o desenvolvimento tecnológico do MotoGP de 2002 a 2011. Modern Motorcycle Technology (CLARKE) mostra todas as partes das motos modernas, com seções sobre o motor, partes mecânicas, alimentação de combustível, combustão, meio ambiente, transmissão final e suspensão – este um outro livro bem legal para formar a base de um curso introdutório, junto com o Cocco e o Bradley. Motocross & Off-Road Performance Handbook, falando de motos para andar em pistas onduladas e de baixo atrito, faz um bom contraponto aos outros livros, que são mais voltados às motos de velocidade.
A base da engenharia da motocicleta é a engenharia mecânica, e há uma porção de livros que podem ser usados para entender os fundamentos do projeto das motocicletas. Segue uma pequena lista de recomendações: Cinemática e Dinâmica dos Mecanismos, Projeto de Maquinas, Resistência dos Materiais, e Fundamentals of Materials Science and Engineering.
As motos e as bicicletas têm a mesma história e a mesma dinâmica. Impossível estudar as motos sem estudar as bicicletas. Performance Cycling (BAIRD) tem muitas ideias que foram usadas neste texto sobre a dinâmica das motocicletas, como o papel das marchas, as resistências ao movimento e a interconexão entre o motor (ciclista), o veículo (bicicleta) e as condições do deslocamento (topologia, vento). Bicycling Science (WILSON) é simplesmente a bíblia da ciência do ciclismo, falando sobre história, fisiologia humana, dinâmica veicular, transferência de calor, arrasto aerodinâmico, resistência à rolagem, frenagem, ciclística, transmissão, materiais, e outros veículos de propulsão humana.
O presente texto tratou da potência necessária para fazer a moto andar para a frente, mas é “interessante” lembrar que para isso os pneus da moto precisam continuar no chão e o piloto precisa ser consciente do que está fazendo. Race Tech’s Motorcycle Suspension Bible é um livro bem prático sobre a regulagem da suspensão das motos, mas que pode ser usado como introdução junto com algum outro livro geral de vibrações mecânicas e de dinâmica. The Upper Half of the Motorcycle: On the Unity of Rider and Machine é único ao discutir a “parte de cima” da motocicleta, com o comportamento psicológico dos motoqueiros.
Deu para perceber pelo que escrevi até agora que sou um fervoroso defensor dos veículos elétricos, muito embora isso parta o meu coração. Reinventing the Automobile discute como serão os veículos do futuro, muito mais eficientes, limpos, práticos e seguros. Ao pensar em como nossos veículos deveriam ser, e não como são, vemos que não há diferenças tão claras entre bicicletas, motocicletas e automóveis. Electric Motors and Drives: Fundamentals, Types and Applications tem uma introdução sobre motores elétricos. Bottled Lightning é um livro sobre a política do desenvolvimento das baterias de lítio, que ainda têm um longo caminho para alcançarem o que precisamos quanto à eficiência, peso, preço e volume de produção. Build Your Own Electric Motorcycle é um DIY (faça você mesmo) sobre como montar uma motocicleta elétrica com componentes disponíveis no mercado. Nada muito profundo, mas inspirador e com boas discussões.
Como falei várias vezes aí em cima, as motos não andam sozinhas como se estivessem em uma propaganda enganosa. No mundo real, as motos são limitadas pelo tráfego. Há uma série de trabalhos interessantes sobre essa área. Traffic Flow Dynamics: Data, Models and Simulation, com a teoria básica de modelos macroscópicos, mesoscópicos e microscópicos. Modelling Transport discute vários modelos para a previsão do tráfego. Fundamentals of Traffic Simulation traz um bom levantamento sobre os vários softwares existentes para a modelagem do tráfego urbano. Um dos livros que eu mais gosto é The Transit Metropolis: A Global Inquiry, que não tem nada a ver com motos e muito pouco com transporte individual, mas mostra um monte de experiências legais ao redor do mundo de implantação de sistemas de transporte de massa.
Se você tem vontade de divulgar algumas verdades, mas tem medo que te forcem a provar documentalmente o que diz, uma boa leitura é McLibel, que conta a inacreditável história de uma grande empresa que entrou na justiça para obrigar alguns dos seus desconhecidos críticos a provarem o que denunciavam. Para o qual eles responderam algo como: “Só se for agora. Principalmente porque essa ação judicial vai divulgar amplamente, de uma forma que jamais conseguiríamos sozinhos, os malefícios causados pelos produtos que vocês comercializam”. Sim, essa burrice corporativa aconteceu de verdade. Não é piada.
Para aspectos não técnicos das motos, recomendo Japan’s Motorcycle Wars: An Industry History, que explica porque a indústria japonesa domina o mundo das motocicletas; Motorcycle, com uma teoria baseada nos Estudos Culturais; Mobilities, que é uma proposta de sociologia não mais baseada na geografia, mas na mobilidade, seja de pessoas, de dinheiro ou de informação; e Concepts of the Self, que é uma discussão sobre as várias teorias psicológicas e sociológicas, mas infelizmente não econômicas, biológicas, filosóficas e políticas, sobre a relação do indivíduo com a sociedade – uma discussão bem relevante para ajudar na investigação de qual é o real papel dos motoqueiros na dinâmica das cidades. Para uma discussão das várias formas já testadas de se fazer política, On Politics: A History of Political Thought: From Herodotus to the Present; para uma revelação de como as grandes empresas nos enganam, No Logo; e para entender o poder da cultura, tanto da que nos domina quanto da que nos libertará, Cultural Studies.
Somos Quem Podemos Ser – Engenheiros do Hawaii